正在加载图片...
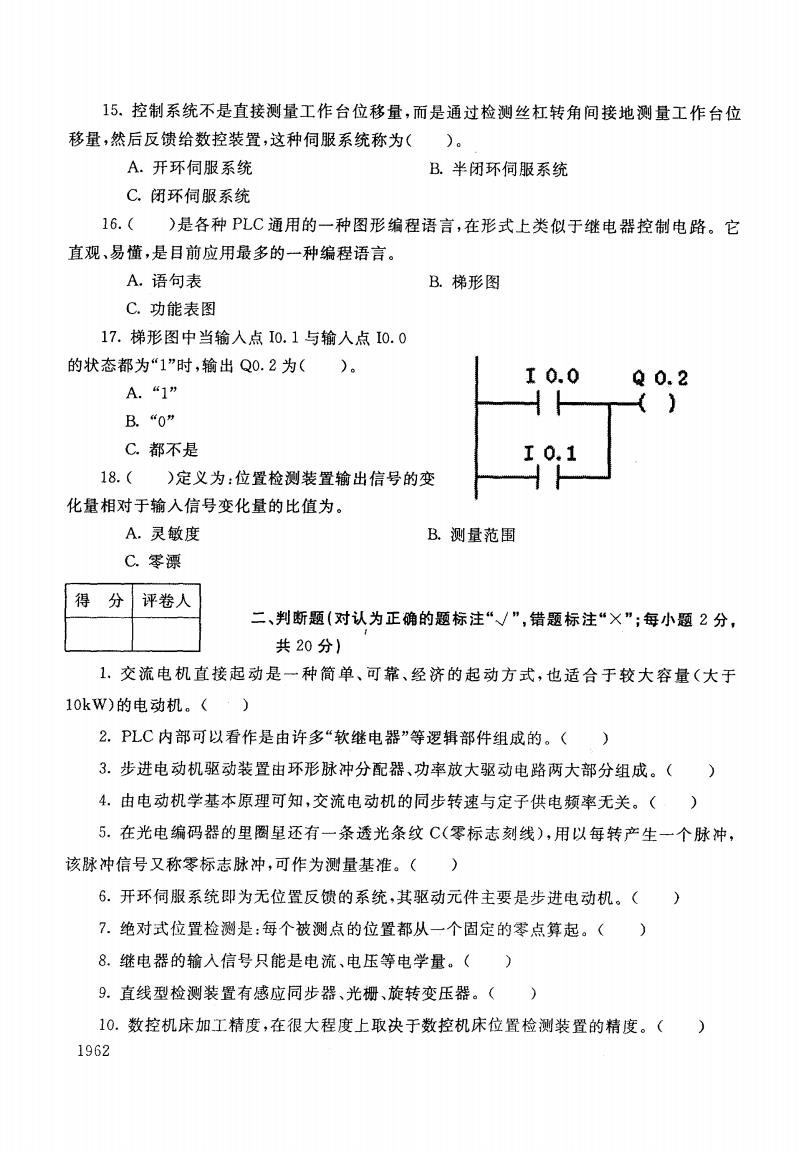
15.控制系统不是直接测量工作台位移量,而是通过检测丝杠转角间接地测量工作台位 移量,然后反馈给数控装置,这种伺服系统称为()。 A.开环伺服系统 B.半闭环伺服系统 C.闭环伺服系统 16.( )是各种PLC通用的一种图形编程语言,在形式上类似于继电器控制电路。它 直观、易懂,是目前应用最多的一种编程语言。 A.语句表 B.梯形图 C.功能表图 17.梯形图中当输入点I0.1与输入点I0.0 的状态都为“1”时,输出Q0.2为( )。 10.0 Q0.2 A.“1” B.“0” C.都不是 0.1 18.( )定义为:位置检测装置输出信号的变 化量相对于输入信号变化量的比值为。 A.灵敏度 B.测量范围 C.零漂 得 分 评卷人 二、判断题(对认为正确的题标注“/”,错题标注“X”;每小题2分, 共20分) 1.交流电机直接起动是一种简单、可靠、经济的起动方式,也适合于较大容量(大于 10kW)的电动机。(·) 2.PLC内部可以看作是由许多“软继电器”等逻辑部件组成的。() 3.步进电动机驱动装置由环形脉冲分配器、功率放大驱动电路两大部分组成。() 4.由电动机学基本原理可知,交流电动机的同步转速与定子供电频率无关。() 5.在光电编码器的里圈里还有一条透光条纹C(零标志刻线),用以每转产生一个脉冲, 该脉冲信号又称零标志脉冲,可作为测量基准。() 6.开环伺服系统即为无位置反馈的系统,其驱动元件主要是步进电动机。() 7.绝对式位置检测是:每个被测点的位置都从一个固定的零点算起。() 8.继电器的输入信号只能是电流、电压等电学量。() 9.直线型检测装置有感应同步器、光栅、旋转变压器。() 10.数控机床加工精度,在很大程度上取决于数控机床位置检测装置的精度。() 196215.控制系统不是直接测量工作台位移量,而是通过检测丝杠转角间接地测量工作台位 移量,然后反馈给数控装置,这种伺服系统称为( )。 A.开环伺服系统 B.半闭环伺服系统 C.闭环伺服系统 16. )是各种 PLC通用的一种图形编程语言,在形式上类似于继电器控制电路。它 直观、易懂,是目前应用最多的一种编程语言。 A。语句表 B.梯形图 C.功能表图 17.梯形图中当输人点 I0. 1与输人点 I0. 0 0. 1 认 1 谨气 1 的状态都为“1"时,输出 Q0. 2为( )。 A. + 1'} s. +o c.都不是 1s.( )定义为:位置检测装置输出信号的变 } +} 4. 2 化量相对于输人信号变化量的比值为。 A.灵敏度 C.零漂 B.测量范围 得 分 评卷人 二、判断题(对认为正确的题标注“丫”,错题标注“X";每小题 2分, 共 20分 ) 1.交流电机直接起动是一种简单、可靠、经济的起动方式,也适合于较大容量(大于 10kV(l)的电动机。( ) 2. PLC内部可以看作是由许多“软继电器”等逻辑部件组成的。( ) 3.步进电动机驱动装置由环形脉冲分配器、功率放大驱动电路两大部分组成。( ) 4.由电动机学基本原理可知,交流电动机的同步转速与定子供电频率无关。( ) 5.在光电编码器的里圈里还有一条透光条纹 C<零标志刻线),用以每转产生一个脉冲, 该脉冲信号又称零标志脉冲,可作为测量基准。( ) 6.开环伺服系统即为无位置反馈的系统,其驱动元件主要是步进电动机。( ) 7.绝对式位置检测是:每个被测点的位置都从一个固定的零点算起。( ) 8.继电器的输人信号只能是电流、电压等电学量。( ) 9.直线型检测装置有感应同步器、光栅、旋转变压器。( ) 10.数控机床加工精度,在很大程度上取决于数控机床位置检测装置的精度。( ) 19f2