正在加载图片...
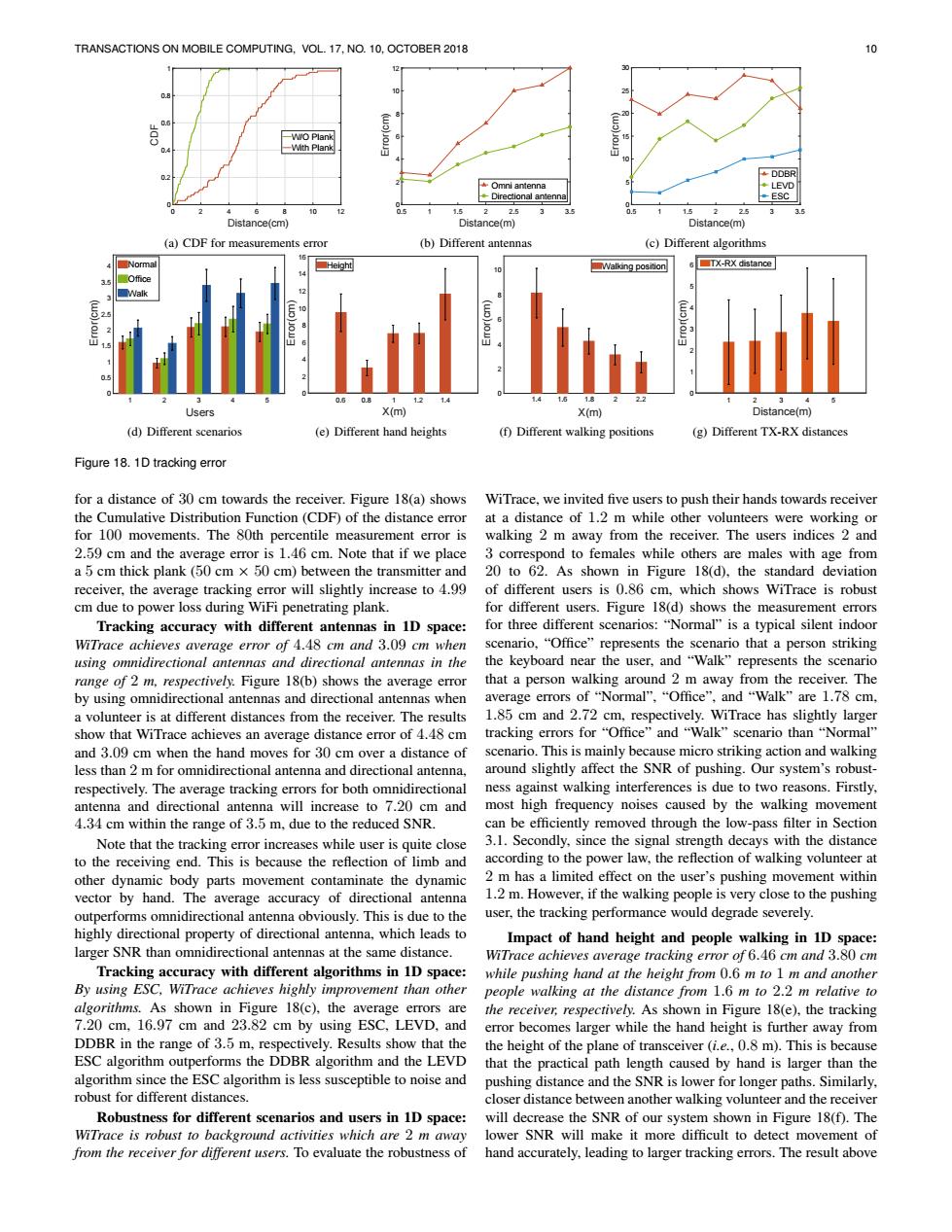
TRANSACTIONS ON MOBILE COMPUTING,VOL.17,NO.10,OCTOBER 2018 10 WrO Plank -With Plank DDBR Omni antenna ◆LEVD Directional antenna ESC 15 2 25 35 15 2 25 3 3.5 Distance(cm) Distance(m) Distance(m) (a)CDF for measurements error (b)Different antennas (c)Different algorithms 雪Valking position TX-RX distance 3 0.50.8 12 18 Users X(m) X(m) Distance(m) (d)Different scenarios (e)Different hand heights (f)Different walking positions (g)Different TX-RX distances Figure 18.1D tracking error for a distance of 30 cm towards the receiver.Figure 18(a)shows WiTrace.we invited five users to push their hands towards receiver the Cumulative Distribution Function (CDF)of the distance error at a distance of 1.2 m while other volunteers were working or for 100 movements.The 80th percentile measurement error is walking 2 m away from the receiver.The users indices 2 and 2.59 cm and the average error is 1.46 cm.Note that if we place 3 correspond to females while others are males with age from a 5 cm thick plank (50 cm x 50 cm)between the transmitter and 20 to 62.As shown in Figure 18(d),the standard deviation receiver,the average tracking error will slightly increase to 4.99 of different users is 0.86 cm,which shows WiTrace is robust cm due to power loss during WiFi penetrating plank. for different users.Figure 18(d)shows the measurement errors Tracking accuracy with different antennas in 1D space: for three different scenarios:"Normal"is a typical silent indoor WiTrace achieves average error of 4.48 cm and 3.09 cm when scenario,"Office"represents the scenario that a person striking using omnidirectional antennas and directional antennas in the the keyboard near the user,and "Walk"represents the scenario range of 2 m,respectively.Figure 18(b)shows the average error that a person walking around 2 m away from the receiver.The by using omnidirectional antennas and directional antennas when average errors of“Normal",“Office”,and“Walk'arel.78cm, a volunteer is at different distances from the receiver.The results 1.85 cm and 2.72 cm,respectively.WiTrace has slightly larger show that WiTrace achieves an average distance error of 4.48 cm tracking errors for“Office”and“Walk”scenario than“Normal" and 3.09 cm when the hand moves for 30 cm over a distance of scenario.This is mainly because micro striking action and walking less than 2 m for omnidirectional antenna and directional antenna, around slightly affect the SNR of pushing.Our system's robust- respectively.The average tracking errors for both omnidirectional ness against walking interferences is due to two reasons.Firstly, antenna and directional antenna will increase to 7.20 cm and most high frequency noises caused by the walking movement 4.34 cm within the range of 3.5 m,due to the reduced SNR. can be efficiently removed through the low-pass filter in Section Note that the tracking error increases while user is quite close 3.1.Secondly,since the signal strength decays with the distance to the receiving end.This is because the reflection of limb and according to the power law,the reflection of walking volunteer at other dynamic body parts movement contaminate the dynamic 2 m has a limited effect on the user's pushing movement within vector by hand.The average accuracy of directional antenna 1.2 m.However,if the walking people is very close to the pushing outperforms omnidirectional antenna obviously.This is due to the user,the tracking performance would degrade severely. highly directional property of directional antenna,which leads to Impact of hand height and people walking in 1D space: larger SNR than omnidirectional antennas at the same distance. WiTrace achieves average tracking error of 6.46 cm and 3.80 cm Tracking accuracy with different algorithms in 1D space: while pushing hand at the height from 0.6 m to 1 m and another By using ESC,WiTrace achieves highly improvement than other people walking at the distance from 1.6 m to 2.2 m relative to algorithms.As shown in Figure 18(c),the average errors are the receiver,respectively.As shown in Figure 18(e),the tracking 7.20 cm,16.97 cm and 23.82 cm by using ESC,LEVD,and error becomes larger while the hand height is further away from DDBR in the range of 3.5 m,respectively.Results show that the the height of the plane of transceiver(i.e.,0.8 m).This is because ESC algorithm outperforms the DDBR algorithm and the LEVD that the practical path length caused by hand is larger than the algorithm since the ESC algorithm is less susceptible to noise and pushing distance and the SNR is lower for longer paths.Similarly, robust for different distances. closer distance between another walking volunteer and the receiver Robustness for different scenarios and users in 1D space: will decrease the SNR of our system shown in Figure 18(f).The WiTrace is robust to background activities which are 2 m away lower SNR will make it more difficult to detect movement of from the receiver for different users.To evaluate the robustness of hand accurately,leading to larger tracking errors.The result aboveTRANSACTIONS ON MOBILE COMPUTING, VOL. 17, NO. 10, OCTOBER 2018 10 0 2 4 6 8 1012 Distance(cm) 0 0.2 0.4 0.6 0.8 1 CDF W/O Plank With Plank (a) CDF for measurements error 0.5 1 1.5 2 2.5 3 3.5 Distance(m) 0 2 4 6 8 10 12 Error(cm) Omni antenna Directional antenna (b) Different antennas 0.5 1 1.5 2 2.5 3 3.5 Distance(m) 0 5 10 15 20 25 30 Error(cm) DDBR LEVD ESC (c) Different algorithms 12345 Users 0 0.5 1 1.5 2 2.5 3 3.5 4 Error(cm) Normal Office Walk (d) Different scenarios 0.6 0.8 1 1.2 1.4 X(m) 0 2 4 6 8 10 12 14 16 Error(cm) Height (e) Different hand heights 2.2 X(m) 0 2 4 6 8 10 Error(cm) Walking position 1.4 1.6 1.8 2 (f) Different walking positions 2 3 4 Distance(m) 0 1 2 3 4 5 6 Error(cm) TX-RX distance 1 5 (g) Different TX-RX distances Figure 18. 1D tracking error for a distance of 30 cm towards the receiver. Figure 18(a) shows the Cumulative Distribution Function (CDF) of the distance error for 100 movements. The 80th percentile measurement error is 2.59 cm and the average error is 1.46 cm. Note that if we place a 5 cm thick plank (50 cm × 50 cm) between the transmitter and receiver, the average tracking error will slightly increase to 4.99 cm due to power loss during WiFi penetrating plank. Tracking accuracy with different antennas in 1D space: WiTrace achieves average error of 4.48 cm and 3.09 cm when using omnidirectional antennas and directional antennas in the range of 2 m, respectively. Figure 18(b) shows the average error by using omnidirectional antennas and directional antennas when a volunteer is at different distances from the receiver. The results show that WiTrace achieves an average distance error of 4.48 cm and 3.09 cm when the hand moves for 30 cm over a distance of less than 2 m for omnidirectional antenna and directional antenna, respectively. The average tracking errors for both omnidirectional antenna and directional antenna will increase to 7.20 cm and 4.34 cm within the range of 3.5 m, due to the reduced SNR. Note that the tracking error increases while user is quite close to the receiving end. This is because the reflection of limb and other dynamic body parts movement contaminate the dynamic vector by hand. The average accuracy of directional antenna outperforms omnidirectional antenna obviously. This is due to the highly directional property of directional antenna, which leads to larger SNR than omnidirectional antennas at the same distance. Tracking accuracy with different algorithms in 1D space: By using ESC, WiTrace achieves highly improvement than other algorithms. As shown in Figure 18(c), the average errors are 7.20 cm, 16.97 cm and 23.82 cm by using ESC, LEVD, and DDBR in the range of 3.5 m, respectively. Results show that the ESC algorithm outperforms the DDBR algorithm and the LEVD algorithm since the ESC algorithm is less susceptible to noise and robust for different distances. Robustness for different scenarios and users in 1D space: WiTrace is robust to background activities which are 2 m away from the receiver for different users. To evaluate the robustness of WiTrace, we invited five users to push their hands towards receiver at a distance of 1.2 m while other volunteers were working or walking 2 m away from the receiver. The users indices 2 and 3 correspond to females while others are males with age from 20 to 62. As shown in Figure 18(d), the standard deviation of different users is 0.86 cm, which shows WiTrace is robust for different users. Figure 18(d) shows the measurement errors for three different scenarios: “Normal” is a typical silent indoor scenario, “Office” represents the scenario that a person striking the keyboard near the user, and “Walk” represents the scenario that a person walking around 2 m away from the receiver. The average errors of “Normal”, “Office”, and “Walk” are 1.78 cm, 1.85 cm and 2.72 cm, respectively. WiTrace has slightly larger tracking errors for “Office” and “Walk” scenario than “Normal” scenario. This is mainly because micro striking action and walking around slightly affect the SNR of pushing. Our system’s robustness against walking interferences is due to two reasons. Firstly, most high frequency noises caused by the walking movement can be efficiently removed through the low-pass filter in Section 3.1. Secondly, since the signal strength decays with the distance according to the power law, the reflection of walking volunteer at 2 m has a limited effect on the user’s pushing movement within 1.2 m. However, if the walking people is very close to the pushing user, the tracking performance would degrade severely. Impact of hand height and people walking in 1D space: WiTrace achieves average tracking error of 6.46 cm and 3.80 cm while pushing hand at the height from 0.6 m to 1 m and another people walking at the distance from 1.6 m to 2.2 m relative to the receiver, respectively. As shown in Figure 18(e), the tracking error becomes larger while the hand height is further away from the height of the plane of transceiver (i.e., 0.8 m). This is because that the practical path length caused by hand is larger than the pushing distance and the SNR is lower for longer paths. Similarly, closer distance between another walking volunteer and the receiver will decrease the SNR of our system shown in Figure 18(f). The lower SNR will make it more difficult to detect movement of hand accurately, leading to larger tracking errors. The result above