正在加载图片...
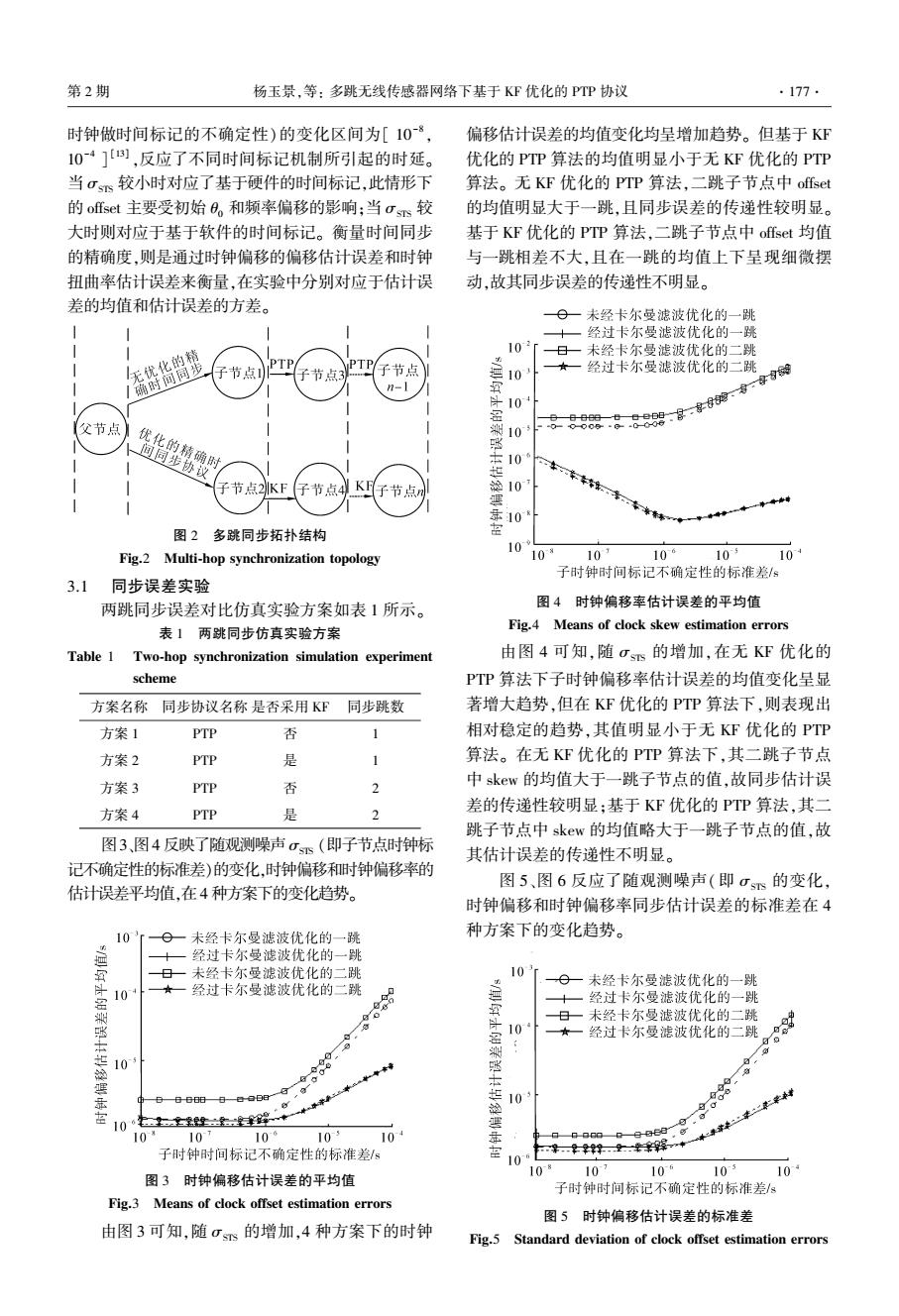
第2期 杨玉景,等:多跳无线传感器网络下基于KF优化的PTP协议 ·177. 时钟做时间标记的不确定性)的变化区间为[10-8, 偏移估计误差的均值变化均呈增加趋势。但基于KF 104]),反应了不同时间标记机制所引起的时延。 优化的PTP算法的均值明显小于无KF优化的PTP 当σs较小时对应了基于硬件的时间标记,此情形下 算法。无KF优化的PTP算法,二跳子节点中offset 的offset主要受初始0。和频率偏移的影响:当σs较 的均值明显大于一跳,且同步误差的传递性较明显。 大时则对应于基于软件的时间标记。衡量时间同步 基于KF优化的PTP算法,二跳子节点中offset均值 的精确度,则是通过时钟偏移的偏移估计误差和时钟 与一跳相差不大,且在一跳的均值上下呈现细微摆 扭曲率估计误差来衡量,在实验中分别对应于估计误 动,故其同步误差的传递性不明显。 差的均值和估计误差的方差。 一未经卡尔曼滤波优化的一跳 经过卡尔曼滤波优化的一跳 102「 日一未经卡尔曼滤波优化的二跳 无优化的 确时间同 子节点 PTP 子节点 PTP子节点 n-1 女一经过卡尔曼滤波优化的二跳 斗10 日88-88gg-多99、9冷 父节点 优化的精确时 间同步 协议 10 子节点2KF子节点4K子节点n 10 10 图2多跳同步拓扑结构 10 Fig.2 Multi-hop synchronization topology 10 10 106 103 10 子时钟时间标记不确定性的标准差/s 3.1 同步误差实验 两跳同步误差对比仿真实验方案如表1所示。 图4时钟偏移率估计误差的平均值 表1两跳同步仿真实验方案 Fig.4 Means of clock skew estimation errors Table 1 Two-hop synchronization simulation experiment 由图4可知,随σs的增加,在无KF优化的 scheme PTP算法下子时钟偏移率估计误差的均值变化呈显 方案名称同步协议名称是否采用KF 同步跳数 著增大趋势,但在KF优化的PTP算法下,则表现出 方案1 PTP 否 相对稳定的趋势,其值明显小于无KF优化的PTP 方案2 PTP 是 1 算法。在无KF优化的PTP算法下,其二跳子节点 方案3 PTP 否 2 中skew的均值大于一跳子节点的值,故同步估计误 方案4 差的传递性较明显:基于KF优化的PTP算法,其二 PTP 是 2 跳子节点中skew的均值略大于一跳子节点的值,故 图3、图4反映了随观测噪声σ(即子节点时钟标 其估计误差的传递性不明显。 记不确定性的标准差)的变化,时钟偏移和时钟偏移率的 估计误差平均值,在4种方案下的变化趋势。 图5、图6反应了随观测噪声(即σs的变化, 时钟偏移和时钟偏移率同步估计误差的标准差在4 10「一O一未经卡尔曼滤波优化的一跳 种方案下的变化趋势。 经过卡尔曼滤波优化的一跳 日一未经卡尔曼滤波优化的二跳 10r 日一未经卡尔曼滤波优化的一跳 ★一经过卡尔曼滤波优化的二跳 十一经过卡尔曼滤波优化的一跳 日一未经卡尔曼滤波优化的二跳 牛10 一★一经过卡尔曼滤波优化的二跳 101 账 嘿 660gg,名930 10“生主主鲤全=学+ 理 10 10 106 103 104 r-9000 8888。g 子时钟时间标记不确定性的标准差/s F108跟d 108 107 106105 101 图3时钟偏移估计误差的平均值 子时钟时间标记不确定性的标准差/s Fig.3 Means of clock offset estimation errors 图5时钟偏移估计误差的标准差 由图3可知,随σs的增加,4种方案下的时钟 Fig.5 Standard deviation of clock offset estimation errors时钟做时间标记的不确定性)的变化区间为[ 10 -8 , 10 -4 ] [13] ,反应了不同时间标记机制所引起的时延。 当 σSTS 较小时对应了基于硬件的时间标记,此情形下 的 offset 主要受初始 θ0 和频率偏移的影响;当 σSTS 较 大时则对应于基于软件的时间标记。 衡量时间同步 的精确度,则是通过时钟偏移的偏移估计误差和时钟 扭曲率估计误差来衡量,在实验中分别对应于估计误 差的均值和估计误差的方差。 图 2 多跳同步拓扑结构 Fig.2 Multi⁃hop synchronization topology 3.1 同步误差实验 两跳同步误差对比仿真实验方案如表 1 所示。 表 1 两跳同步仿真实验方案 Table 1 Two⁃hop synchronization simulation experiment scheme 方案名称 同步协议名称 是否采用 KF 同步跳数 方案 1 PTP 否 1 方案 2 PTP 是 1 方案 3 PTP 否 2 方案 4 PTP 是 2 图3、图4 反映了随观测噪声σSTS (即子节点时钟标 记不确定性的标准差)的变化,时钟偏移和时钟偏移率的 估计误差平均值,在4 种方案下的变化趋势。 图 3 时钟偏移估计误差的平均值 Fig.3 Means of clock offset estimation errors 由图 3 可知,随 σSTS 的增加,4 种方案下的时钟 偏移估计误差的均值变化均呈增加趋势。 但基于 KF 优化的 PTP 算法的均值明显小于无 KF 优化的 PTP 算法。 无 KF 优化的 PTP 算法,二跳子节点中 offset 的均值明显大于一跳,且同步误差的传递性较明显。 基于 KF 优化的 PTP 算法,二跳子节点中 offset 均值 与一跳相差不大,且在一跳的均值上下呈现细微摆 动,故其同步误差的传递性不明显。 图 4 时钟偏移率估计误差的平均值 Fig.4 Means of clock skew estimation errors 由图 4 可知,随 σSTS 的增加,在无 KF 优化的 PTP 算法下子时钟偏移率估计误差的均值变化呈显 著增大趋势,但在 KF 优化的 PTP 算法下,则表现出 相对稳定的趋势,其值明显小于无 KF 优化的 PTP 算法。 在无 KF 优化的 PTP 算法下,其二跳子节点 中 skew 的均值大于一跳子节点的值,故同步估计误 差的传递性较明显;基于 KF 优化的 PTP 算法,其二 跳子节点中 skew 的均值略大于一跳子节点的值,故 其估计误差的传递性不明显。 图 5、图 6 反应了随观测噪声(即 σSTS 的变化, 时钟偏移和时钟偏移率同步估计误差的标准差在 4 种方案下的变化趋势。 图 5 时钟偏移估计误差的标准差 Fig.5 Standard deviation of clock offset estimation errors 第 2 期 杨玉景,等: 多跳无线传感器网络下基于 KF 优化的 PTP 协议 ·177·