点击下载:广东工业大学:《三维逆向工程技术》课程教学资源(讲义)关节臂式测量系统
正在加载图片...
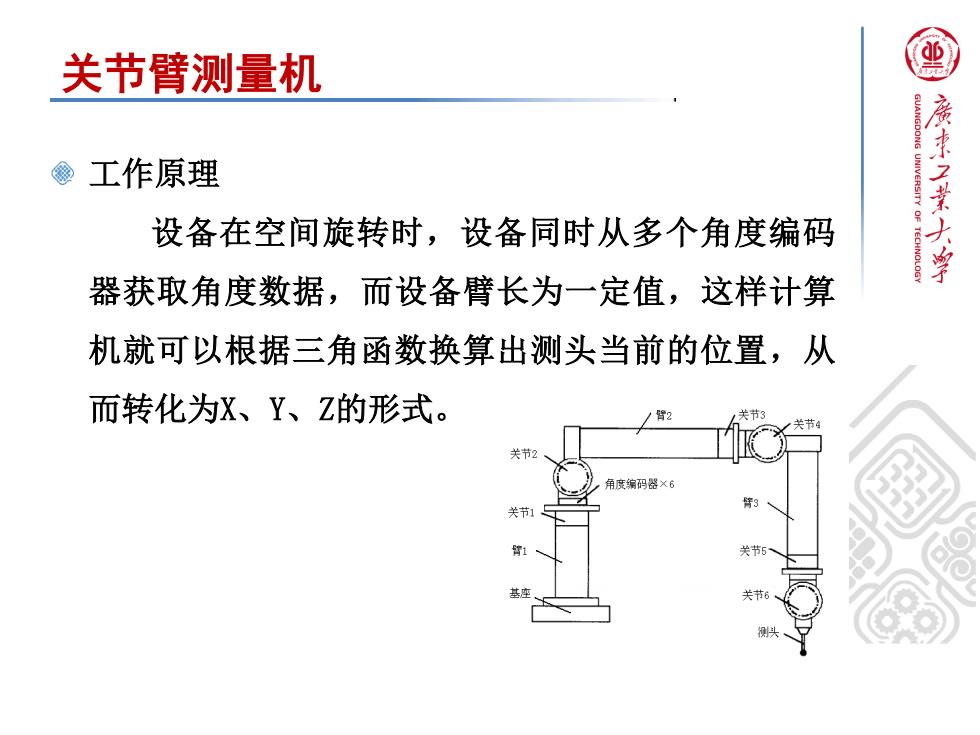
关节臂测量机 @工作原理 设备在空间旋转时,设备同时从多个角度编码 器获取角度数据,而设备臂长为一定值,这样计算 机就可以根据三角函数换算出测头当前的位置,从 而转化为X、Y、Z的形式。 臂2 关节4 关节2 角度编码器×6 关节】 臂1 基座 关节6 工作原理 设备在空间旋转时,设备同时从多个角度编码 器获取角度数据,而设备臂长为一定值,这样计算 机就可以根据三角函数换算出测头当前的位置,从 而转化为X、Y、Z的形式。 关节臂测量机
<<向上翻页
向下翻页>>
点击下载:广东工业大学:《三维逆向工程技术》课程教学资源(讲义)关节臂式测量系统
©2008-现在 cucdc.com 高等教育资讯网 版权所有