正在加载图片...
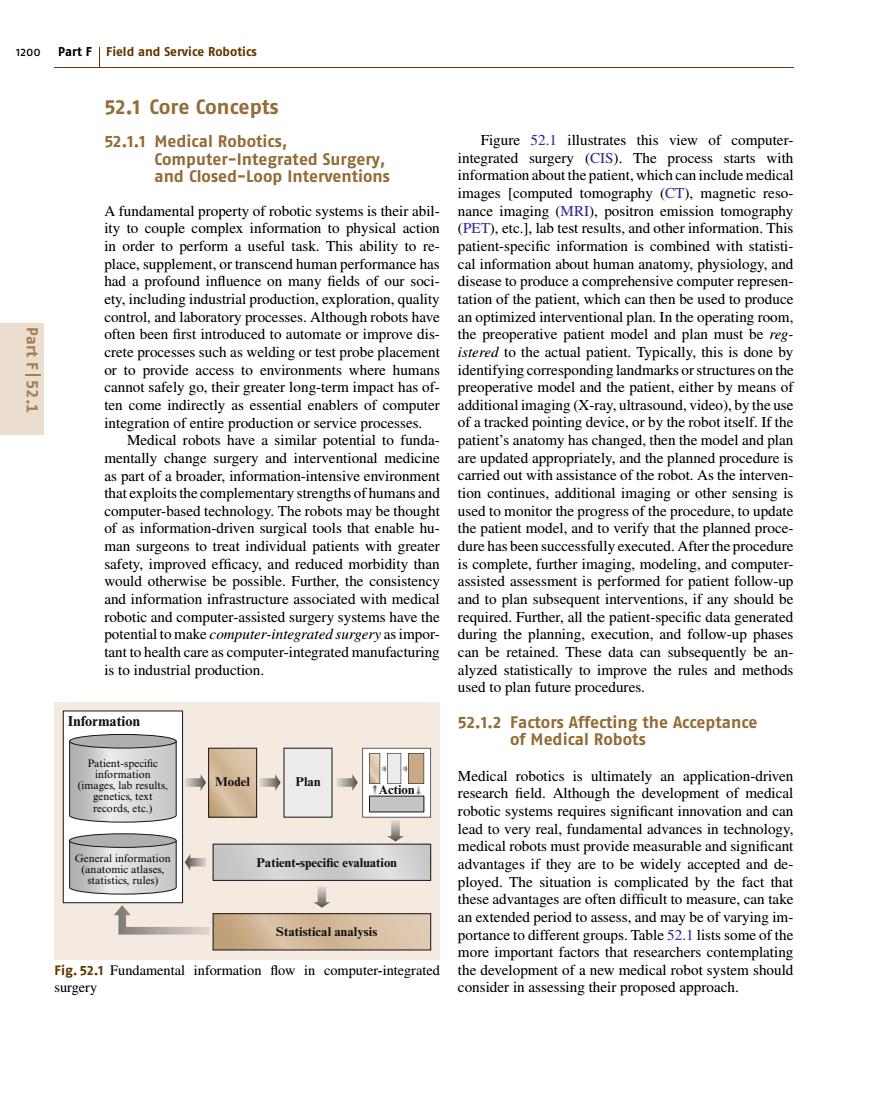
1200 Part F Field and Service Robotics 52.1 Core Concepts 52.1.1 Medical Robotics, Figure 52.1 illustrates this view of computer- Computer-Integrated Surgery, integrated surgery (CIS).The process starts with and Closed-Loop Interventions information about the patient,which can include medical images [computed tomography (CT).magnetic reso- A fundamental property of robotic systems is their abil- nance imaging (MRD),positron emission tomography ity to couple complex information to physical action (PET),etc.],lab test results,and other information.This in order to perform a useful task.This ability to re- patient-specific information is combined with statisti- place,supplement,or transcend human performance has cal information about human anatomy,physiology,and had a profound influence on many fields of our soci- disease to produce a comprehensive computer represen- ety,including industrial production,exploration,quality tation of the patient,which can then be used to produce control,and laboratory processes.Although robots have an optimized interventional plan.In the operating room, Part often been first introduced to automate or improve dis- the preoperative patient model and plan must be reg- crete processes such as welding or test probe placement istered to the actual patient.Typically,this is done by F-52 or to provide access to environments where humans identifying corresponding landmarks or structures on the cannot safely go,their greater long-term impact has of- preoperative model and the patient,either by means of ten come indirectly as essential enablers of computer additional imaging (X-ray,ultrasound,video),by the use integration of entire production or service processes. of a tracked pointing device,or by the robot itself.If the Medical robots have a similar potential to funda- patient's anatomy has changed,then the model and plan mentally change surgery and interventional medicine are updated appropriately,and the planned procedure is as part of a broader,information-intensive environment carried out with assistance of the robot.As the interven- that exploits the complementary strengths of humans and tion continues,additional imaging or other sensing is computer-based technology.The robots may be thought used to monitor the progress of the procedure,to update of as information-driven surgical tools that enable hu- the patient model,and to verify that the planned proce- man surgeons to treat individual patients with greater dure has been successfully executed.After the procedure safety,improved efficacy,and reduced morbidity than is complete,further imaging,modeling,and computer- would otherwise be possible.Further,the consistency assisted assessment is performed for patient follow-up and information infrastructure associated with medical and to plan subsequent interventions,if any should be robotic and computer-assisted surgery systems have the required.Further,all the patient-specific data generated potential to make computer-integrated surgery as impor- during the planning,execution,and follow-up phases tant to health care as computer-integrated manufacturing can be retained.These data can subsequently be an- is to industrial production. alyzed statistically to improve the rules and methods used to plan future procedures. Information 52.1.2 Factors Affecting the Acceptance of Medical Robots Patient-specific information (images,lab results Model Plan Medical robotics is ultimately an application-driven genetics.text Acton research field.Although the development of medical records,etc.) robotic systems requires significant innovation and can lead to very real,fundamental advances in technology, medical robots must provide measurable and significant General information (anatomic atlases. Patient-specific evaluation advantages if they are to be widely accepted and de- statistics,rules) ployed.The situation is complicated by the fact that these advantages are often difficult to measure,can take an extended period to assess,and may be of varying im- Statistical analysis portance to different groups.Table 52.1 lists some of the more important factors that researchers contemplating Fig.52.1 Fundamental information flow in computer-integrated the development of a new medical robot system should surgery consider in assessing their proposed approach.1200 Part F Field and Service Robotics 52.1 Core Concepts 52.1.1 Medical Robotics, Computer-Integrated Surgery, and Closed-Loop Interventions A fundamental property of robotic systems is their ability to couple complex information to physical action in order to perform a useful task. This ability to replace, supplement, or transcend human performance has had a profound influence on many fields of our society, including industrial production, exploration, quality control, and laboratory processes. Although robots have often been first introduced to automate or improve discrete processes such as welding or test probe placement or to provide access to environments where humans cannot safely go, their greater long-term impact has often come indirectly as essential enablers of computer integration of entire production or service processes. Medical robots have a similar potential to fundamentally change surgery and interventional medicine as part of a broader, information-intensive environment that exploits the complementary strengths of humans and computer-based technology. The robots may be thought of as information-driven surgical tools that enable human surgeons to treat individual patients with greater safety, improved efficacy, and reduced morbidity than would otherwise be possible. Further, the consistency and information infrastructure associated with medical robotic and computer-assisted surgery systems have the potential to make computer-integrated surgery as important to health care as computer-integrated manufacturing is to industrial production. Information Statistical analysis Patient-specific evaluation Model Plan Action Patient-specific information (images, lab results, genetics, text records, etc.) General information (anatomic atlases, statistics, rules) Fig. 52.1 Fundamental information flow in computer-integrated surgery Figure 52.1 illustrates this view of computerintegrated surgery (CIS). The process starts with information about the patient, which can include medical images [computed tomography (CT), magnetic resonance imaging (MRI), positron emission tomography (PET), etc.], lab test results, and other information. This patient-specific information is combined with statistical information about human anatomy, physiology, and disease to produce a comprehensive computer representation of the patient, which can then be used to produce an optimized interventional plan. In the operating room, the preoperative patient model and plan must be registered to the actual patient. Typically, this is done by identifying corresponding landmarks or structures on the preoperative model and the patient, either by means of additional imaging (X-ray, ultrasound, video), by the use of a tracked pointing device, or by the robot itself. If the patient’s anatomy has changed, then the model and plan are updated appropriately, and the planned procedure is carried out with assistance of the robot. As the intervention continues, additional imaging or other sensing is used to monitor the progress of the procedure, to update the patient model, and to verify that the planned procedure has been successfully executed. After the procedure is complete, further imaging, modeling, and computerassisted assessment is performed for patient follow-up and to plan subsequent interventions, if any should be required. Further, all the patient-specific data generated during the planning, execution, and follow-up phases can be retained. These data can subsequently be analyzed statistically to improve the rules and methods used to plan future procedures. 52.1.2 Factors Affecting the Acceptance of Medical Robots Medical robotics is ultimately an application-driven research field. Although the development of medical robotic systems requires significant innovation and can lead to very real, fundamental advances in technology, medical robots must provide measurable and significant advantages if they are to be widely accepted and deployed. The situation is complicated by the fact that these advantages are often difficult to measure, can take an extended period to assess, and may be of varying importance to different groups. Table 52.1 lists some of the more important factors that researchers contemplating the development of a new medical robot system should consider in assessing their proposed approach. Part F 52.1