正在加载图片...
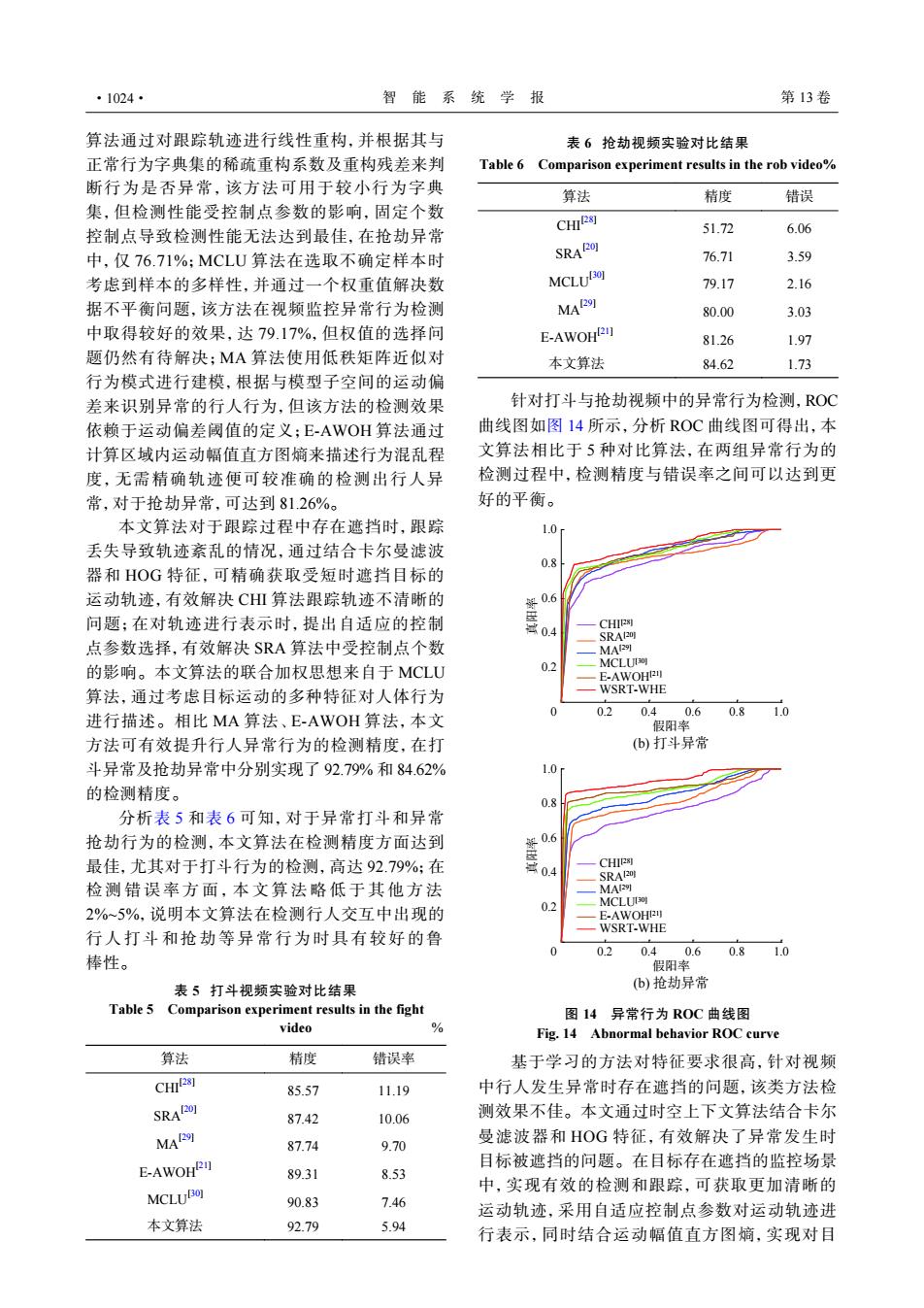
·1024· 智能系统学报 第13卷 算法通过对跟踪轨迹进行线性重构,并根据其与 表6抢劫视频实验对比结果 正常行为字典集的稀疏重构系数及重构残差来判 Table 6 Comparison experiment results in the rob video% 断行为是否异常,该方法可用于较小行为字典 算法 精度 错误 集,但检测性能受控制点参数的影响,固定个数 控制点导致检测性能无法达到最佳,在抢劫异常 CHΠ2图 51.72 6.06 中,仅76.71%:MCLU算法在选取不确定样本时 SRARO 76.71 3.59 考虑到样本的多样性,并通过一个权重值解决数 MCLU30 79.17 2.16 据不平衡问题,该方法在视频监控异常行为检测 MA19I 80.00 3.03 中取得较好的效果,达79.17%,但权值的选择问 E-AWOHL211 81.26 1.97 题仍然有待解决;MA算法使用低秩矩阵近似对 本文算法 84.62 1.73 行为模式进行建模,根据与模型子空间的运动偏 差来识别异常的行人行为,但该方法的检测效果 针对打斗与抢劫视频中的异常行为检测,ROC 依赖于运动偏差阈值的定义;E-AWOH算法通过 曲线图如图14所示,分析ROC曲线图可得出,本 计算区域内运动幅值直方图嫡来描述行为混乱程 文算法相比于5种对比算法,在两组异常行为的 度,无需精确轨迹便可较准确的检测出行人异 检测过程中,检测精度与错误率之间可以达到更 常,对于抢劫异常,可达到81.26%。 好的平衡。 本文算法对于跟踪过程中存在遮挡时,跟踪 1.0 丢失导致轨迹紊乱的情况,通过结合卡尔曼滤波 0.8 器和HOG特征,可精确获取受短时遮挡目标的 运动轨迹,有效解决CHⅢ算法跟踪轨迹不清晰的 0.6 问题:在对轨迹进行表示时,提出自适应的控制 04 CHIESI 点参数选择,有效解决SRA算法中受控制点个数 .MA2例 的影响。本文算法的联合加权思想来自于MCLU 0.2 MCLUOI E-AWOHRI 算法,通过考虑目标运动的多种特征对人体行为 WSRT-WHE 0.2 0.4 进行描述。相比MA算法、E-AWOH算法,本文 .6 0.8 1.0 假阳率 方法可有效提升行人异常行为的检测精度,在打 (b)打斗异常 斗异常及抢劫异常中分别实现了92.79%和84.62% 1.0 的检测精度。 0.8 分析表5和表6可知,对于异常打斗和异常 抢劫行为的检测,本文算法在检测精度方面达到 0.6 最佳,尤其对于打斗行为的检测,高达92.79%:在 -CHI8网 SRARD 检测错误率方面,本文算法略低于其他方法 -MA2例 MCLUBOI 2%~5%,说明本文算法在检测行人交互中出现的 0.2 E-AWOHI WSRT-WHE 行人打斗和抢劫等异常行为时具有较好的鲁 0.2 0.4 0.6 0.8 1.0 棒性。 假阳率 表5打斗视频实验对比结果 (b)抢劫异常 Table 5 Comparison experiment results in the fight 图14异常行为R0C曲线图 video % Fig.14 Abnormal behavior ROC curve 算法 精度 错误率 基于学习的方法对特征要求很高,针对视频 CHI28] 85.57 11.19 中行人发生异常时存在遮挡的问题,该类方法检 SRAPOI 87.42 10.06 测效果不佳。本文通过时空上下文算法结合卡尔 MAR9 曼滤波器和HOG特征,有效解决了异常发生时 87.74 9.70 E-AWOHEI 目标被遮挡的问题。在目标存在遮挡的监控场景 89.31 8.53 MCLUBO] 中,实现有效的检测和跟踪,可获取更加清晰的 90.83 7.46 运动轨迹,采用自适应控制点参数对运动轨迹进 本文算法 92.79 5.94 行表示,同时结合运动幅值直方图嫡,实现对目算法通过对跟踪轨迹进行线性重构,并根据其与 正常行为字典集的稀疏重构系数及重构残差来判 断行为是否异常,该方法可用于较小行为字典 集,但检测性能受控制点参数的影响,固定个数 控制点导致检测性能无法达到最佳,在抢劫异常 中,仅 76.71%;MCLU 算法在选取不确定样本时 考虑到样本的多样性,并通过一个权重值解决数 据不平衡问题,该方法在视频监控异常行为检测 中取得较好的效果,达 79.17%,但权值的选择问 题仍然有待解决;MA 算法使用低秩矩阵近似对 行为模式进行建模,根据与模型子空间的运动偏 差来识别异常的行人行为,但该方法的检测效果 依赖于运动偏差阈值的定义;E-AWOH 算法通过 计算区域内运动幅值直方图熵来描述行为混乱程 度,无需精确轨迹便可较准确的检测出行人异 常,对于抢劫异常,可达到 81.26%。 本文算法对于跟踪过程中存在遮挡时,跟踪 丢失导致轨迹紊乱的情况,通过结合卡尔曼滤波 器和 HOG 特征,可精确获取受短时遮挡目标的 运动轨迹,有效解决 CHI 算法跟踪轨迹不清晰的 问题;在对轨迹进行表示时,提出自适应的控制 点参数选择,有效解决 SRA 算法中受控制点个数 的影响。本文算法的联合加权思想来自于 MCLU 算法,通过考虑目标运动的多种特征对人体行为 进行描述。相比 MA 算法、E-AWOH 算法,本文 方法可有效提升行人异常行为的检测精度,在打 斗异常及抢劫异常中分别实现了 92.79% 和 84.62% 的检测精度。 分析表 5 和表 6 可知,对于异常打斗和异常 抢劫行为的检测,本文算法在检测精度方面达到 最佳,尤其对于打斗行为的检测,高达 92.79%;在 检测错误率方面,本文算法略低于其他方法 2%~5%,说明本文算法在检测行人交互中出现的 行人打斗和抢劫等异常行为时具有较好的鲁 棒性。 针对打斗与抢劫视频中的异常行为检测,ROC 曲线图如图 14 所示,分析 ROC 曲线图可得出,本 文算法相比于 5 种对比算法,在两组异常行为的 检测过程中,检测精度与错误率之间可以达到更 好的平衡。 假阳率 (b) 抢劫异常 (b) 打斗异常 假阳率 0 0.2 0.4 0.6 0.8 1.0 0.2 0.4 0.6 0.8 1.0 真阳率 0 0.2 0.4 0.6 0.8 1.0 0.2 0.4 0.6 0.8 1.0 真阳率 CHI[28] SRA[20] MA[29] MCLU[30] E-AWOH[21] WSRT-WHE CHI[28] SRA[20] MA[29] MCLU[30] E-AWOH[21] WSRT-WHE 图 14 异常行为 ROC 曲线图 Fig. 14 Abnormal behavior ROC curve 基于学习的方法对特征要求很高,针对视频 中行人发生异常时存在遮挡的问题,该类方法检 测效果不佳。本文通过时空上下文算法结合卡尔 曼滤波器和 HOG 特征,有效解决了异常发生时 目标被遮挡的问题。在目标存在遮挡的监控场景 中,实现有效的检测和跟踪,可获取更加清晰的 运动轨迹,采用自适应控制点参数对运动轨迹进 行表示,同时结合运动幅值直方图熵,实现对目 表 5 打斗视频实验对比结果 Table 5 Comparison experiment results in the fight video % 算法 精度 错误率 CHI[28] 85.57 11.19 SRA[20] 87.42 10.06 MA[29] 87.74 9.70 E-AWOH[21] 89.31 8.53 MCLU[30] 90.83 7.46 本文算法 92.79 5.94 表 6 抢劫视频实验对比结果 Table 6 Comparison experiment results in the rob video% 算法 精度 错误 CHI[28] 51.72 6.06 SRA[20] 76.71 3.59 MCLU[30] 79.17 2.16 MA[29] 80.00 3.03 E-AWOH[21] 81.26 1.97 本文算法 84.62 1.73 ·1024· 智 能 系 统 学 报 第 13 卷