正在加载图片...
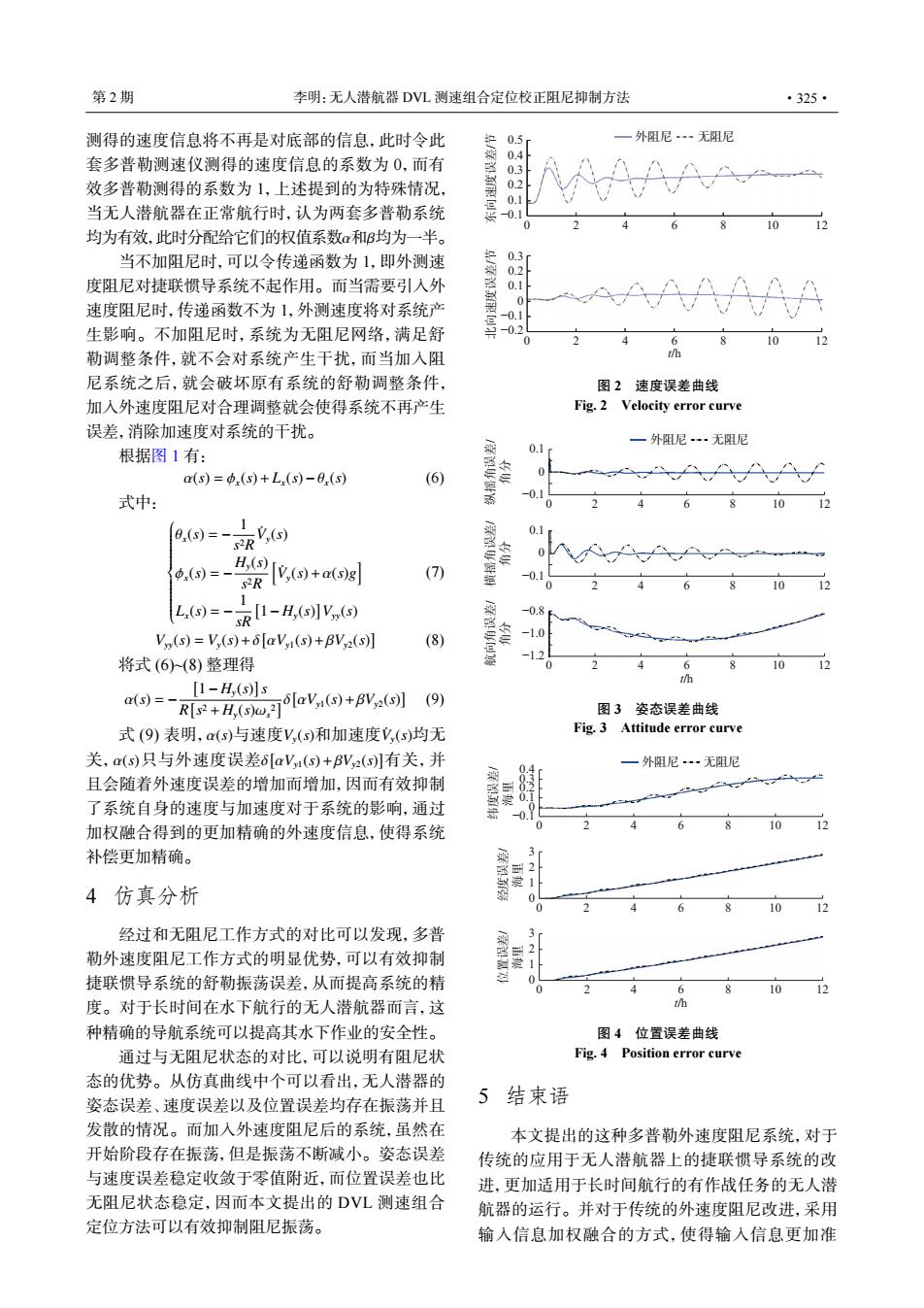
第2期 李明:无人潜航器DVL测速组合定位校正阻尼抑制方法 ·325· 测得的速度信息将不再是对底部的信息,此时令此 0.5 外阻尼-一无阻尼 套多普勒测速仪测得的速度信息的系数为0,而有 0.4 效多普勒测得的系数为1,上述提到的为特殊情况, 0.2 0.1 当无人潜航器在正常航行时,认为两套多普勒系统 -0.1 0 1012 均为有效,此时分配给它们的权值系数α和B均为一半。 当不加阻尼时,可以令传递函数为1,即外测速 0.3 0.2 度阻尼对捷联惯导系统不起作用。而当需要引入外 0.1 速度阻尼时,传递函数不为1,外测速度将对系统产 0 -0.1 生影响。不加阻尼时,系统为无阻尼网络,满足舒 墨-02 10 12 勒调整条件,就不会对系统产生干扰,而当加入阻 尼系统之后,就会破坏原有系统的舒勒调整条件, 图2速度误差曲线 加入外速度阻尼对合理调整就会使得系统不再产生 Fig.2 Velocity error curve 误差,消除加速度对系统的干扰。 根据图1有: 羚 一外阻尼·无阻尼 0.1 a(s)=中(S)+L,(s)-0(s) (6) 0 AAAAAf 式中: -0.1 1012 0(s)=- 01 0 φ()=- ggo+amsg (7 -0.1 10 1 1 L()=- 1-,(s,句 -0.8 V(s)=V,(s)+6[aV(s)+BV,2(s)] (8) -1.0 -1.2 将式(6)(8)整理得 6 1012 t/h a)= aV(+BV [1-H,(s]s (9) 图3姿态误差曲线 式(9)表明,a(s)与速度V,(s)和加速度立,(s)均无 Fig.3 Attitude error curve 关,(s)只与外速度误差daV(s)+BV2(s]有关,并 一外阻尼·无阻尼 0.4 且会随着外速度误差的增加而增加,因而有效抑制 了系统自身的速度与加速度对于系统的影响,通过 1 加权融合得到的更加精确的外速度信息,使得系统 10 补偿更加精确。 4仿真分析 15 经过和无阻尼工作方式的对比可以发现,多普 勒外速度阻尼工作方式的明显优势,可以有效抑制 捷联惯导系统的舒勒振荡误差,从而提高系统的精 6 10 1 度。对于长时间在水下航行的无人潜航器而言,这 tlh 种精确的导航系统可以提高其水下作业的安全性。 图4位置误差曲线 通过与无阻尼状态的对比,可以说明有阻尼状 Fig.4 Position error curve 态的优势。从仿真曲线中个可以看出,无人潜器的 姿态误差、速度误差以及位置误差均存在振荡并且 5结束语 发散的情况。而加入外速度阻尼后的系统,虽然在 本文提出的这种多普勒外速度阻尼系统,对于 开始阶段存在振荡,但是振荡不断减小。姿态误差 传统的应用于无人潜航器上的捷联惯导系统的改 与速度误差稳定收敛于零值附近,而位置误差也比 进,更加适用于长时间航行的有作战任务的无人潜 无阻尼状态稳定,因而本文提出的DVL测速组合 航器的运行。并对于传统的外速度阻尼改进,采用 定位方法可以有效抑制阻尼振荡。 输入信息加权融合的方式,使得输入信息更加准α β 测得的速度信息将不再是对底部的信息,此时令此 套多普勒测速仪测得的速度信息的系数为 0,而有 效多普勒测得的系数为 1,上述提到的为特殊情况, 当无人潜航器在正常航行时,认为两套多普勒系统 均为有效,此时分配给它们的权值系数 和 均为一半。 当不加阻尼时,可以令传递函数为 1,即外测速 度阻尼对捷联惯导系统不起作用。而当需要引入外 速度阻尼时,传递函数不为 1,外测速度将对系统产 生影响。不加阻尼时,系统为无阻尼网络,满足舒 勒调整条件,就不会对系统产生干扰,而当加入阻 尼系统之后,就会破坏原有系统的舒勒调整条件, 加入外速度阻尼对合理调整就会使得系统不再产生 误差,消除加速度对系统的干扰。 根据图 1 有: α(s) = ϕx(s)+ Lx(s)−θx(s) (6) 式中: θx(s) = − 1 s 2R V˙ y(s) ϕx(s) = − Hy(s) s 2R [ V˙ y(s)+α(s)g ] Lx(s) = − 1 sR [ 1− Hy(s) ] Vyy(s) (7) Vyy(s) = Vy(s)+δ [ αVy1(s)+βVy2(s) ] (8) 将式 (6)~(8) 整理得 α(s) = − [ 1− Hy(s) ] s R [ s 2 + Hy(s)ωs 2 ] δ [ αVy1(s)+βVy2(s) ] (9) α(s) Vy(s) V˙ y(s) α(s) δ [ αVy1(s)+βVy2(s) ] 式 (9) 表明, 与速度 和加速度 均无 关, 只与外速度误差 有关,并 且会随着外速度误差的增加而增加,因而有效抑制 了系统自身的速度与加速度对于系统的影响,通过 加权融合得到的更加精确的外速度信息,使得系统 补偿更加精确。 4 仿真分析 经过和无阻尼工作方式的对比可以发现,多普 勒外速度阻尼工作方式的明显优势,可以有效抑制 捷联惯导系统的舒勒振荡误差,从而提高系统的精 度。对于长时间在水下航行的无人潜航器而言,这 种精确的导航系统可以提高其水下作业的安全性。 通过与无阻尼状态的对比,可以说明有阻尼状 态的优势。从仿真曲线中个可以看出,无人潜器的 姿态误差、速度误差以及位置误差均存在振荡并且 发散的情况。而加入外速度阻尼后的系统,虽然在 开始阶段存在振荡,但是振荡不断减小。姿态误差 与速度误差稳定收敛于零值附近,而位置误差也比 无阻尼状态稳定,因而本文提出的 DVL 测速组合 定位方法可以有效抑制阻尼振荡。 0.5 0.4 0.3 0.2 0.1 −0.1 0.3 0.2 0.1 0 −0.1 −0.2 ͈ऽ䕋Ꮢ䄛ጚ/㞮 ࡃऽ䕋Ꮢ䄛ጚ㞮 0 2 4 6 8 10 12 0 2 4 6 8 10 12 t/h โ䭧ᅨ ᬌ䭧ᅨ 图 2 速度误差曲线 Fig. 2 Velocity error curve 0.1 0 −0.1 0.1 0 −0.1 −0.8 −1.0 −1.2 ㏡ᥳ㻾䄛ጚ 㻾ܲ ὖᥳ㻾䄛ጚ 㻾ܲ 㝖ऽ㻾䄛ጚ 㻾ܲ โ䭧ᅨ ᬌ䭧ᅨ 0 2 4 6 8 10 12 0 2 4 6 8 10 12 0 2 4 6 8 10 12 t/h 图 3 姿态误差曲线 Fig. 3 Attitude error curve 0.4 0.3 0.2 0.1 0 ㏘Ꮢ䄛ጚ −0.1 ⊣䛸 ㏻Ꮢ䄛ጚ ⊣䛸 ѹ㒚䄛ጚ ⊣䛸 โ䭧ᅨ ᬌ䭧ᅨ 0 2 4 6 8 10 12 0 2 4 6 8 10 12 0 2 4 6 8 10 12 3 2 1 0 3 2 1 0 t/h 图 4 位置误差曲线 Fig. 4 Position error curve 5 结束语 本文提出的这种多普勒外速度阻尼系统,对于 传统的应用于无人潜航器上的捷联惯导系统的改 进,更加适用于长时间航行的有作战任务的无人潜 航器的运行。并对于传统的外速度阻尼改进,采用 输入信息加权融合的方式,使得输入信息更加准 第 2 期 李明:无人潜航器 DVL 测速组合定位校正阻尼抑制方法 ·325·