正在加载图片...
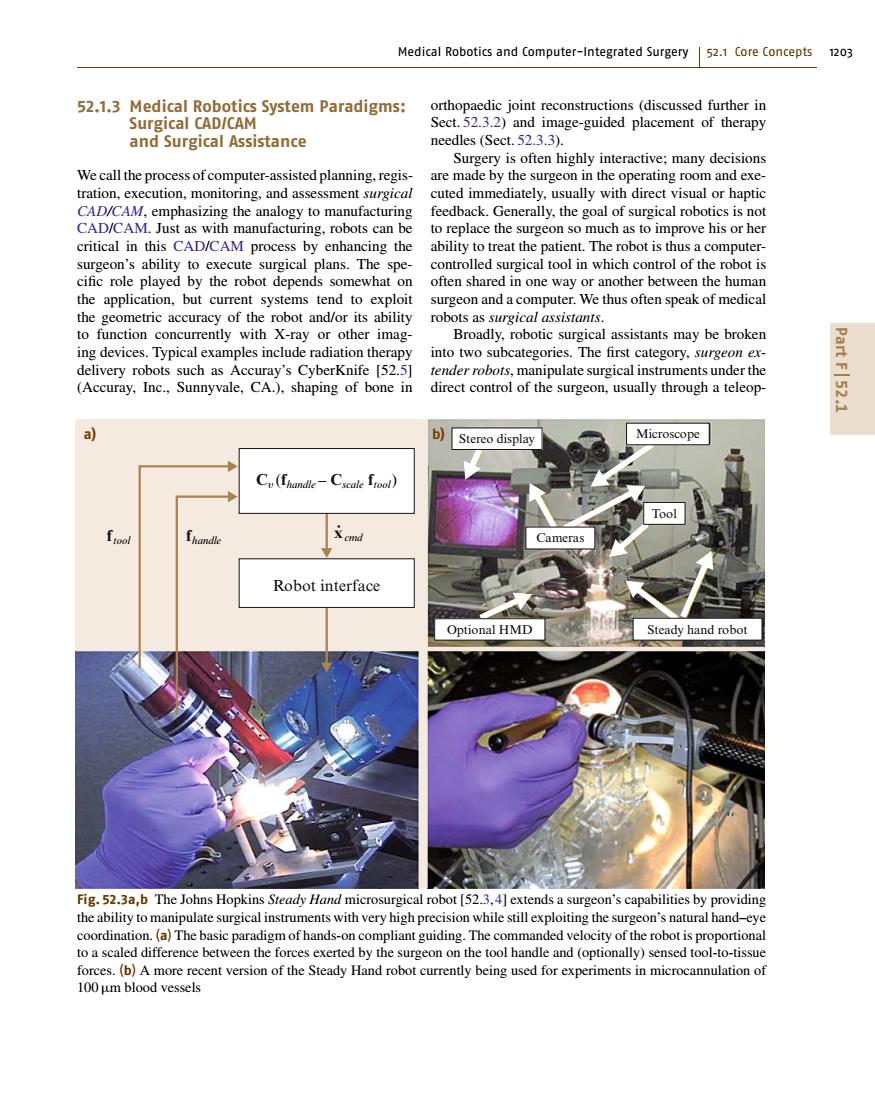
Medical Robotics and Computer-Integrated Surgery 52.1 Core Concepts 1203 52.1.3 Medical Robotics System Paradigms: orthopaedic joint reconstructions(discussed further in Surgical CAD/CAM Sect.52.3.2)and image-guided placement of therapy and Surgical Assistance needles (Sect.52.3.3). Surgery is often highly interactive;many decisions We call the process of computer-assisted planning,regis- are made by the surgeon in the operating room and exe- tration,execution,monitoring,and assessment surgical cuted immediately,usually with direct visual or haptic CAD/CAM,emphasizing the analogy to manufacturing feedback.Generally,the goal of surgical robotics is not CAD/CAM.Just as with manufacturing,robots can be to replace the surgeon so much as to improve his or her critical in this CAD/CAM process by enhancing the ability to treat the patient.The robot is thus a computer- surgeon's ability to execute surgical plans.The spe-controlled surgical tool in which control of the robot is cific role played by the robot depends somewhat on often shared in one way or another between the human the application,but current systems tend to exploit surgeon and a computer.We thus often speak of medical the geometric accuracy of the robot and/or its ability robots as surgical assistants. to function concurrently with X-ray or other imag- Broadly,robotic surgical assistants may be broken ing devices.Typical examples include radiation therapy into two subcategories.The first category,surgeon ex- delivery robots such as Accuray's CyberKnife [52.5] tender robots.manipulate surgical instruments under the (Accuray,Inc.,Sunnyvale,CA.),shaping of bone in direct control of the surgeon,usually through a teleop- Part F52 a) b) Stereo display Microscope C.n(任handte-Cscale frool) Tool handle Cameras Robot interface Optional HMD Steady hand robot Fig.52.3a,b The Johns Hopkins Steady Hand microsurgical robot [52.3,4]extends a surgeon's capabilities by providing the ability to manipulate surgical instruments with very high precision while still exploiting the surgeon's natural hand-eye coordination.(a)The basic paradigm of hands-on compliant guiding.The commanded velocity of the robot is proportional to a scaled difference between the forces exerted by the surgeon on the tool handle and (optionally)sensed tool-to-tissue forces.(b)A more recent version of the Steady Hand robot currently being used for experiments in microcannulation of l00μn blood vesselsMedical Robotics and Computer-Integrated Surgery 52.1 Core Concepts 1203 52.1.3 Medical Robotics System Paradigms: Surgical CAD/CAM and Surgical Assistance We call the process of computer-assisted planning, registration, execution, monitoring, and assessment surgical CAD/CAM, emphasizing the analogy to manufacturing CAD/CAM. Just as with manufacturing, robots can be critical in this CAD/CAM process by enhancing the surgeon’s ability to execute surgical plans. The specific role played by the robot depends somewhat on the application, but current systems tend to exploit the geometric accuracy of the robot and/or its ability to function concurrently with X-ray or other imaging devices. Typical examples include radiation therapy delivery robots such as Accuray’s CyberKnife [52.5] (Accuray, Inc., Sunnyvale, CA.), shaping of bone in fhandle a) b) Stereo display Microscope Tool Cameras Optional HMD Steady hand robot x · f cmd tool Robot interface Cυ (fhandle – Cscale ftool) Fig. 52.3a,b The Johns Hopkins Steady Hand microsurgical robot [52.3,4] extends a surgeon’s capabilities by providing the ability to manipulate surgical instruments with very high precision while still exploiting the surgeon’s natural hand–eye coordination. (a) The basic paradigm of hands-on compliant guiding. The commanded velocity of the robot is proportional to a scaled difference between the forces exerted by the surgeon on the tool handle and (optionally) sensed tool-to-tissue forces. (b) A more recent version of the Steady Hand robot currently being used for experiments in microcannulation of 100μm blood vessels orthopaedic joint reconstructions (discussed further in Sect. 52.3.2) and image-guided placement of therapy needles (Sect. 52.3.3). Surgery is often highly interactive; many decisions are made by the surgeon in the operating room and executed immediately, usually with direct visual or haptic feedback. Generally, the goal of surgical robotics is not to replace the surgeon so much as to improve his or her ability to treat the patient. The robot is thus a computercontrolled surgical tool in which control of the robot is often shared in one way or another between the human surgeon and a computer. We thus often speak of medical robots as surgical assistants. Broadly, robotic surgical assistants may be broken into two subcategories. The first category, surgeon extender robots, manipulate surgical instruments under the direct control of the surgeon, usually through a teleopPart F 52.1