正在加载图片...
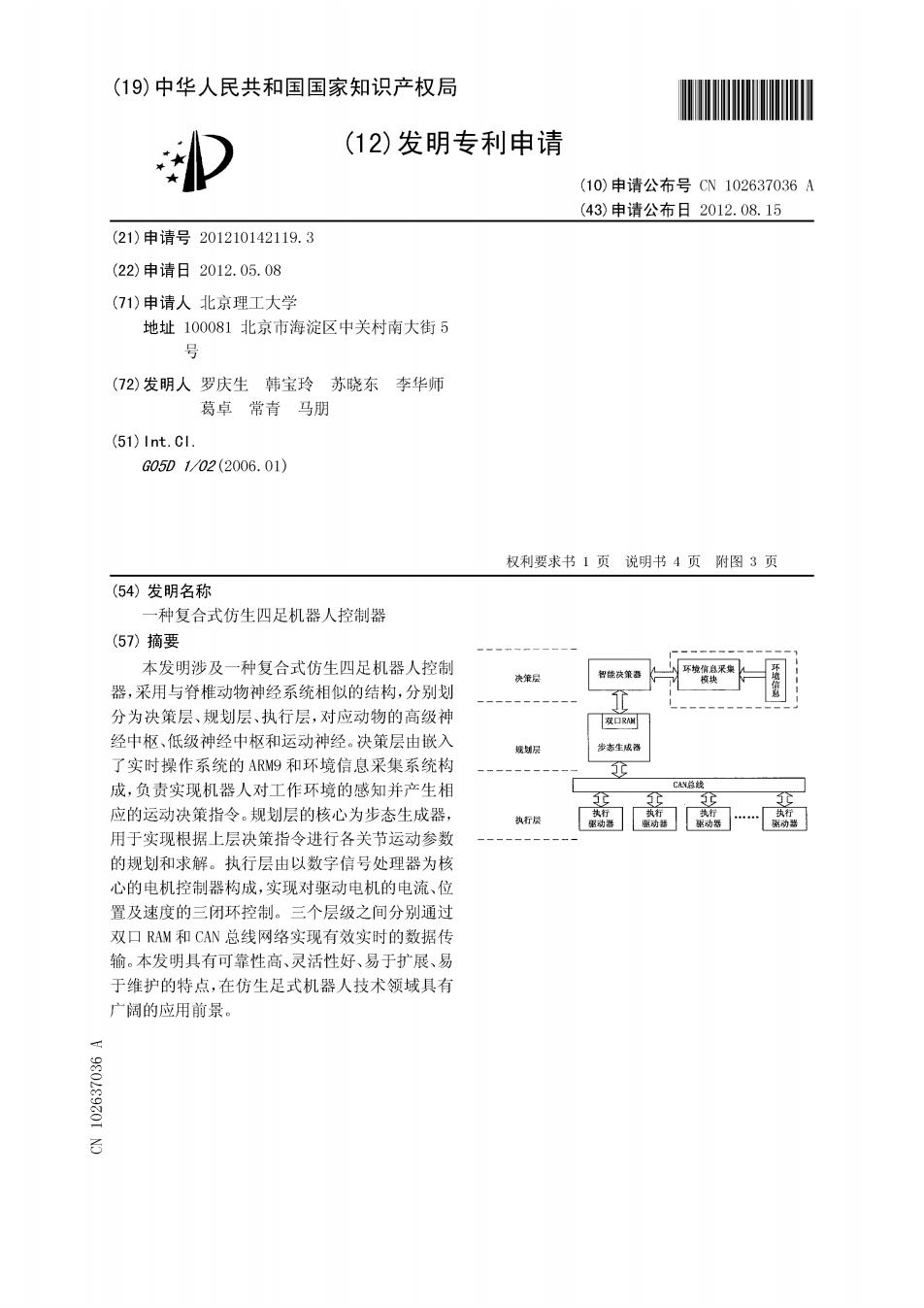
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN102637036A (43)申请公布日2012.08.15 (21)申请号201210142119.3 (22)申请日2012.05.08 (71)申请人北京理工大学 地址100081北京市海淀区中关村南大街5 号 (72)发明人罗庆生韩宝玲苏晓东李华师 葛卓常青马朋 (51)1nt.C1 G05D102(2006.01) 权利要求书1页说明书4页附图3页 (54)发明名称 种复合式仿生四足机器人控制器 (57)摘要 本发明涉及一种复合式仿生四足机器人控制 决策层 智能庆策 器,采用与脊椎动物神经系统相似的结构,分别划 分为决策层、规划层、执行层,对应动物的高级神 双口RNM 经中枢、低级神经中枢和运动神经。决策层由嵌入 规划层 步态生成器 了实时操作系统的ARM9和环境信息采集系统构 成,负责实现机器人对工作环境的感知并产生相 CAN总线 应的运动决策指令。规划层的核心为步态生成器, 执行层 用于实现根据上层决策指令进行各关节运动参数 的规划和求解。执行层由以数字信号处理器为核 心的电机控制器构成,实现对驱动电机的电流、位 置及速度的三闭环控制。三个层级之间分别通过 双口RAM和CAN总线网络实现有效实时的数据传 输。本发明具有可靠性高、灵活性好、易于扩展、易 于维护的特点,在仿生足式机器人技术领域具有 广阔的应用前景