正在加载图片...
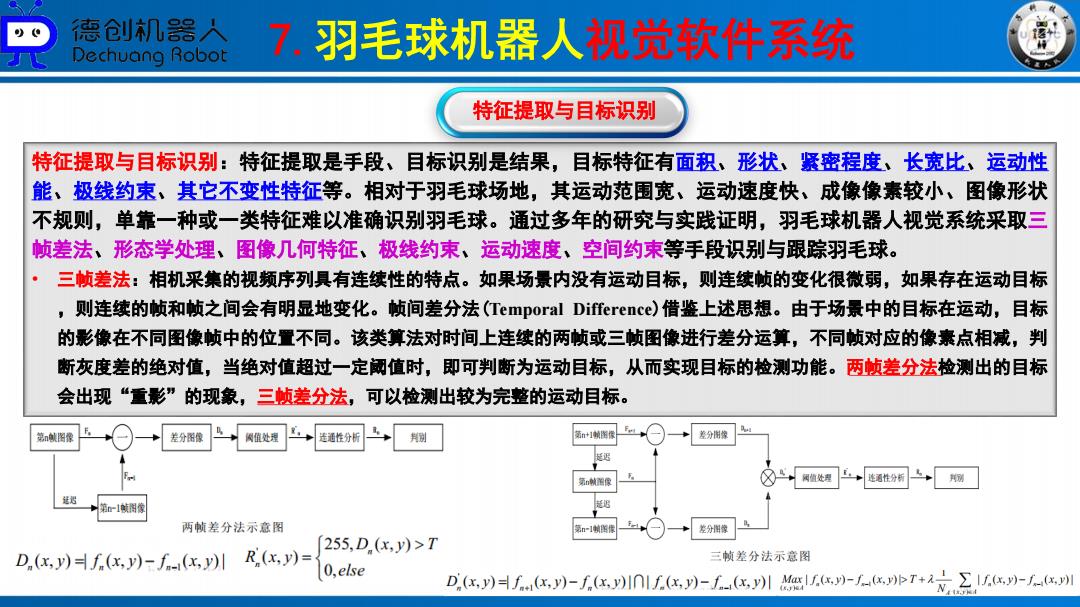
德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 特征提取与目标识别 特征提取与目标识别:特征提取是手段、目标识别是结果,目标特征有面积、形状、紧密程度、长宽比、运动性 能、极线约束、其它不变性特征等。相对于羽毛球场地,其运动范围宽、运动速度快、成像像素较小、图像形状 不规则,单靠一种或一类特征难以准确识别羽毛球。通过多年的研究与实践证明,羽毛球机器人视觉系统采取三 帧差法、形态学处理、图像几何特征、极线约束、运动速度、空间约束等手段识别与跟踪羽毛球。 ·三帧差法:相机采集的视频序列具有连续性的特点。如果场景内没有运动目标,则连续帧的变化很微弱,如果存在运动目标 ,则连续的帧和帧之间会有明显地变化。帧间差分法(Temporal Difference)借鉴上述思想。由于场景中的目标在运动,目标 的影像在不同图像帧中的位置不同。该类算法对时间上连续的两帧或三帧图像进行差分运算,不同帧对应的像素点相减,判 断灰度差的绝对值,当绝对值超过一定阔值时,即可判断为运动目标,从而实现目标的检测功能。两帧差分法检测出的目标 会出现“重影”的现象,三帧差分法, 可以检测出较为完整的运动目标。 第n献图豫 差分像 风值处理 通性分析 判到 +1顿图保 差分 连通性分析 延君 两帧差分法示意图 差分图等 255,D.(x,y)>T D.(x,y)f(x.y)-f(x,y)I R.(x,y)= 三帧差分法示意图 0,else D,(x,)fc,y)-f(,川门川f(y)-fx,y川Mc-xpT+a∑1E.xy-x川7.羽毛球机器人视觉软件系统 9 特征提取与目标识别 特征提取与目标识别:特征提取是手段、目标识别是结果,目标特征有面积、形状、紧密程度、长宽比、运动性 能、极线约束、其它不变性特征等。相对于羽毛球场地,其运动范围宽、运动速度快、成像像素较小、图像形状 不规则,单靠一种或一类特征难以准确识别羽毛球。通过多年的研究与实践证明,羽毛球机器人视觉系统采取三 帧差法、形态学处理、图像几何特征、极线约束、运动速度、空间约束等手段识别与跟踪羽毛球。 • 三帧差法:相机采集的视频序列具有连续性的特点。如果场景内没有运动目标,则连续帧的变化很微弱,如果存在运动目标 ,则连续的帧和帧之间会有明显地变化。帧间差分法(Temporal Difference)借鉴上述思想。由于场景中的目标在运动,目标 的影像在不同图像帧中的位置不同。该类算法对时间上连续的两帧或三帧图像进行差分运算,不同帧对应的像素点相减,判 断灰度差的绝对值,当绝对值超过一定阈值时,即可判断为运动目标,从而实现目标的检测功能。两帧差分法检测出的目标 会出现“重影”的现象,三帧差分法,可以检测出较为完整的运动目标