正在加载图片...
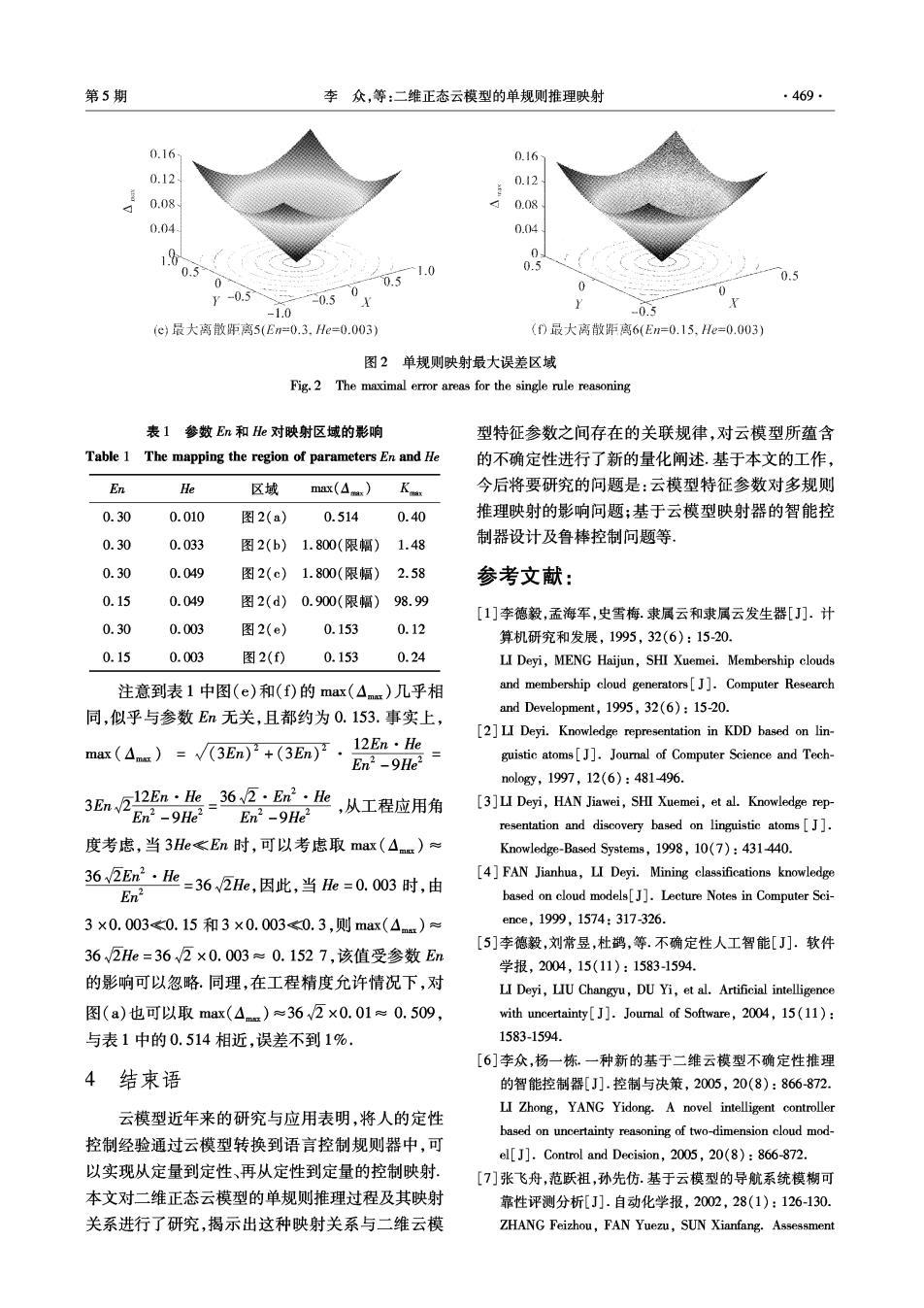
第5期 李众,等:二维正态云模型的单规则推理映射 ·469 0.16 0.16 0.12 0.12 0.08 0.08 0.04 0.04 1 0 0.5 0.5 1.0 0.5 0.5 0 -05 050 0 -1.0 -0.5 e)最大离散距离5(En=0.3.He=0.003) (f)最大离散距离6(En=0.15.He=0.003) 图2单规则映射最大误差区域 Fig.2 The maximal error areas for the single rule reasoning 表1参数En和He对映射区域的影响 型特征参数之间存在的关联规律,对云模型所蕴含 Table 1 The mapping the region of parameters En and He 的不确定性进行了新的量化阐述.基于本文的工作, n He 区域 max(Ar) Kaus 今后将要研究的问题是:云模型特征参数对多规则 0.30 0.010 图2(a) 0.514 0.40 推理映射的影响问题;基于云模型映射器的智能控 0.30 0.033 图2(b)1.800(限幅) 1.48 制器设计及鲁棒控制问题等。 0.30 0.049 图2(c)1.800(限幅) 2.58 参考文献: 0.15 0.049 图2(d)0.900(限幅)98.99 [1]李德毅,孟海军,史雪梅.隶属云和隶属云发生器[J].计 0.30 0.003 图2(e) 0.153 0.12 算机研究和发展,1995,32(6):15-20. 0.15 0.003 图2(f) 0.153 0.24 LI Deyi,MENG Haijun,SHI Xuemei.Membership clouds 注意到表1中图(e)和(f)的max(△mm)几乎相 and membership cloud generators[J].Computer Research 同,似乎与参数En无关,且都约为0.153.事实上, and Development,1995,32(6):15-20. [2]LI Deyi.Knowledge representation in KDD based on lin- max (A)=(3En)+(3En).12En.He En2-9He2 = guistic atoms[J].Journal of Computer Science and Tech- nolog7,1997,12(6):481496. 3En212En-He362.En.He [3]LI Deyi,HAN Jiawei,SHI Xuemei,et al.Knowledge rep- En2-9He2 En2-9He2 ,从工程应用角 resentation and discovery based on linguistic atoms J]. 度考虑,当3He≤En时,可以考虑取max(△ms)≈ Knowledge-Based Systems,1998,10(7):431-440. 362Em2.=36V2e,因此,当e=0.003时,由 [4]FAN Jianhua,LI Deyi.Mining classifications knowledge En2 based on cloud models[J].Lecture Notes in Computer Sci- 3×0.003<0.15和3×0.003<0.3,则max(4mm)≈ ence,1999,1574:317-326 [5]李德毅,刘常昱,杜鸪,等.不确定性人工智能[J].软件 36√2He=36√2×0.003≈0.1527,该值受参数En 学报,2004,15(11):1583-1594. 的影响可以忽略.同理,在工程精度允许情况下,对 LI Deyi,LIU Changyu,DU Yi,et al.Artificial intelligence 图(a)也可以取max(4m)≈36√2×0.01≈0.509, with uncertainty[J].Journal of Software,2004,15(11): 与表1中的0.514相近,误差不到1%. 1583-1594. [6]李众,杨一栋。一种新的基于二维云模型不确定性推理 4结束语 的智能控制器[J刀.控制与决策,2005,20(8):866872 云模型近年来的研究与应用表明,将人的定性 LI Zhong,YANG Yidong.A novel intelligent controller based on uncertainty reasoning of two-dimension cloud mod- 控制经验通过云模型转换到语言控制规则器中,可 el[J].Control and Decision,2005,20(8):866-872. 以实现从定量到定性、再从定性到定量的控制映射. [7]张飞舟,范跃祖,孙先仿.基于云模型的导航系统模糊可 本文对二维正态云模型的单规则推理过程及其映射 靠性评测分析[J].自动化学报,2002,28(1):126-130. 关系进行了研究,揭示出这种映射关系与二维云模 ZHANG Feizhou,FAN Yuezu,SUN Xianfang.Assessment