正在加载图片...
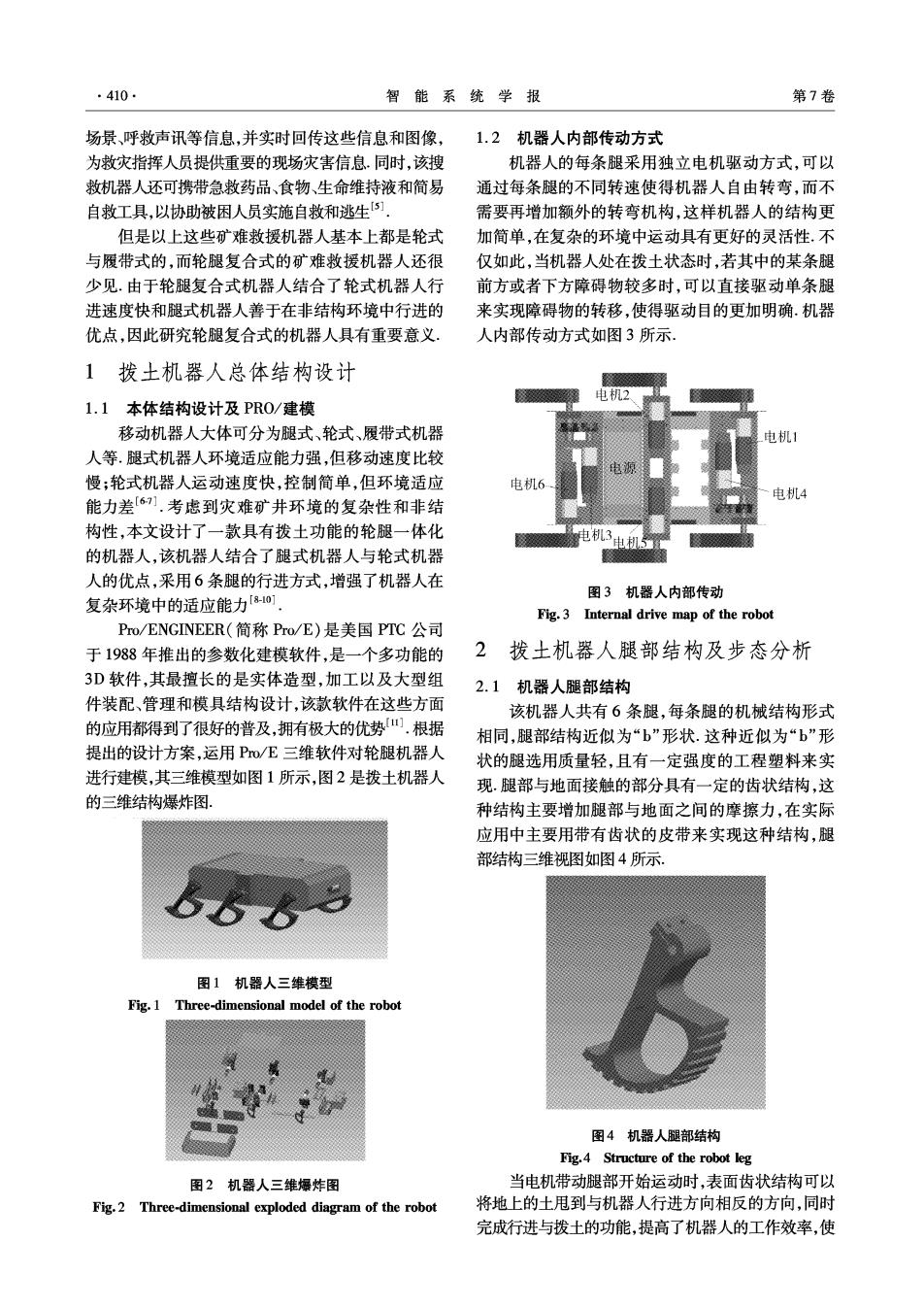
.410 智能系统学报 第7卷 场景、呼救声讯等信息,并实时回传这些信息和图像, 1.2机器人内部传动方式 为救灾指挥人员提供重要的现场灾害信息.同时,该搜 机器人的每条腿采用独立电机驱动方式,可以 救机器人还可携带急救药品、食物、生命维持液和简易 通过每条腿的不同转速使得机器人自由转弯,而不 自救工具,以协助被困人员实施自救和逃生5] 需要再增加额外的转弯机构,这样机器人的结构更 但是以上这些矿难救援机器人基本上都是轮式 加简单,在复杂的环境中运动具有更好的灵活性.不 与履带式的,而轮腿复合式的矿难救援机器人还很 仅如此,当机器人处在拨土状态时,若其中的某条腿 少见.由于轮腿复合式机器人结合了轮式机器人行 前方或者下方障碍物较多时,可以直接驱动单条腿 进速度快和腿式机器人善于在非结构环境中行进的 来实现障碍物的转移,使得驱动目的更加明确.机器 优点,因此研究轮腿复合式的机器人具有重要意义, 人内部传动方式如图3所示。 1拨土机器人总体结构设计 电机2 1.1本体结构设计及PRO/建模 移动机器人大体可分为腿式、轮式、履带式机器 电机1 人等.腿式机器人环境适应能力强,但移动速度比较 慢;轮式机器人运动速度快,控制简单,但环境适应 电机6 电机4 能力差6刃,考虑到灾难矿井环境的复杂性和非结 构性,本文设计了一款具有拨土功能的轮腿一体化 电机3 的机器人,该机器人结合了腿式机器人与轮式机器 人的优点,采用6条腿的行进方式,增强了机器人在 图3机器人内部传动 复杂环境中的适应能力[81o Fig.3 Internal drive map of the robot Po/ENGINEER(简称Pro/E)是美国PTC公司 于1988年推出的参数化建模软件,是一个多功能的 2拨土机器人腿部结构及步态分析 3D软件,其最擅长的是实体造型,加工以及大型组 2.1机器人腿部结构 件装配、管理和模具结构设计,该款软件在这些方面 该机器人共有6条腿,每条腿的机械结构形式 的应用都得到了很好的普及,拥有极大的优势).根据 相同,腿部结构近似为“b”形状.这种近似为“b”形 提出的设计方案,运用PO/E三维软件对轮腿机器人 状的腿选用质量轻,且有一定强度的工程塑料来实 进行建模,其三维模型如图1所示,图2是拨土机器人 现.腿部与地面接触的部分具有一定的齿状结构,这 的三维结构爆炸图 种结构主要增加腿部与地面之间的摩擦力,在实际 应用中主要用带有齿状的皮带来实现这种结构,腿 部结构三维视图如图4所示。 图1机器人三维模型 Fig.I Three-dimensional model of the robot 图4机器人腿部结构 Fig.4 Structure of the robot leg 图2机器人三维爆炸图 当电机带动腿部开始运动时,表面齿状结构可以 Fig.2 Three-dimensional exploded diagram of the robot 将地上的土甩到与机器人行进方向相反的方向,同时 完成行进与拨土的功能,提高了机器人的工作效率,使