正在加载图片...
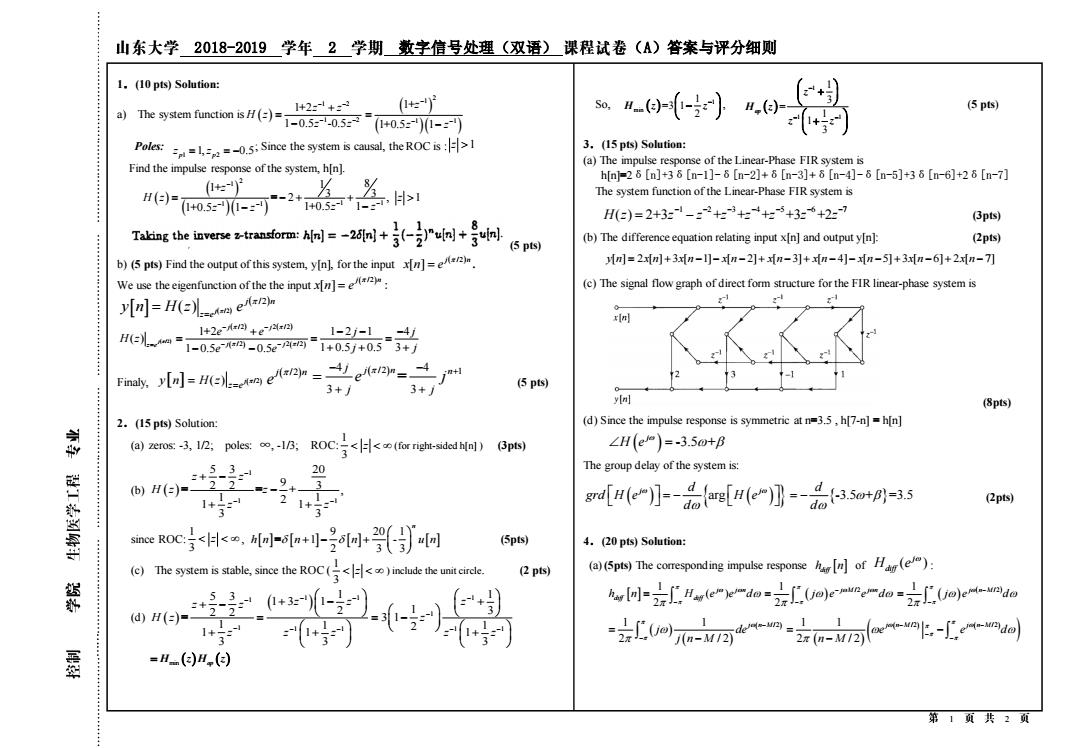
山东大学2018-2019学年2学期数字信号处理(双语)课程试卷(A)答案与评分细则 1.(10 pts)Solution: 1+2:+22 The ystem funtions(日)1-05e05“(4o.5s90-s可 S0, 4(-) (5pts) Poles:.5:Since the system is causal,the ROC is> 3.(15pts)Solution: Find the impulse response of the system,hin]. (a)The impulse response of the Linear-Phase FIR system is hln-26[n]+36[n-1]-6[n-2]+6[n-3]+8[n-4]-6[n-5]+36[m-6]+26[n-7] () 8/ H阳o3-可2+益+各. The system function of the Linear-Phase FIR system is He)=2+3z1-22+3+4+5+326+2=7 (3pts) Taling the iaverserr: (5 pts) (b)The difference equation relating input x[n]and output y[n]: (2pts) b)(5 pts)Find the output of this system,yn].for the input m=2x+3n-刂-x对n-2]+可n-3]+m-4-对n-]+3xn-6+2n-7刀 We use the eigenfunction of the the inputxn: (c)The signal flow graph of direct form structure for the FIR linear-phase system is y[n]=H( x 1+2ee四+e24=四 H(e儿Aa= ,121=4 =1-0.5ee吗-0.5e4啊-1+0.57+0.53+ Fna,儿=He儿a网ee2n=eean=4 3+ 3+1 (5 pts) 网 (8pts) 2.(15 pts)Solution: (d)Since the impulse response is symmetric at n=3.5,h[7-n]=hin] eros:,poles:o-1;ROC:(for right-sided h (3pts) ∠H(eo)=-3.5o+p 531 20 The group delay of the system is: 的 + )H(e)=22_- 9 3 8[He】=-品[He〗=-品35o+py=35 (2pts) c,a-小sa+-a(4回 (5pts) 4.(20 pts)Solution: (c)The system is stable,since the ROC()include the unit circle. (2 pts) (a)(5pts)The corresponding impulse response of) 强 53 (eedo(o)edo(o)et-udo (d)H()= 22 =H.()H() 第1项共22018-2019 2 数字信号处理(双语) (A)答案与评分细则 1 2 1.(10 pts) Solution: a) The system function is ( ) 1 2 1 2 1+2 1 0.5 -0.5 z z H z z z − − − − + = − ( ) ( )( ) 2 1 1 1 1+ 1+0.5 1 − − − = − z z z Poles: 1 2 = = − 1, 0.5 p p z z ; Since the system is causal, the ROC is : z 1 Find the impulse response of the system, h[n]. ( ) ( ) ( )( ) 2 1 1 1 1 1 1 8 1+ 3 3 = 2 , 1 1+0.5 1 1+0.5 1 − − − − − = − + + − − z H z z z z z z (5 pts) b) (5 pts) Find the output of this system, y[n], for the input ( /2) [ ] = j n x n e . We use the eigenfunction of the the input ( /2) [ ] = j n x n e : ( ) ( ) /2 / 2 ( ) = = j j n z e y n H z e ( ) ( ) ( ) ( ) ( ) / 2 /2 2 /2 /2 2 /2 1+2 1 2 1 4 ( ) 1 0.5 0.5 1 0.5 0.5 3 − − = − − + − − − = = = − − + + + j j j z e j j e e j j H z e e j j Finaly, ( ) ( ) /2 / 2 ( ) = = j j n z e y n H z e 4 4 ( / 2) 1 3 3 = j n n j j j e j − − + + + = (5 pts) 2.(15 pts) Solution: (a) zeros: -3, 1/2; poles: ∞, -1/3; ROC: 1 3 z (for right-sided h[n] ) (3pts) (b) ( ) 1 1 1 5 3 20 2 2 9 3 = = + 1 1 2 1 1 3 3 − − − + − − + + z z H z z z z , since ROC: 1 3 z , 9 20 1 = 1 - 2 3 3 n h n n n u n + − + (5pts) (c) The system is stable, since the ROC ( 1 3 z ) include the unit circle. (2 pts) (d) ( ) ( ) 1 1 1 1 1 1 5 3 1 1 3 1 2 2 2 = 1 1 1 1 3 3 − − − − − − + − + − = + + z z z z H z z z z 1 1 1 1 1 1 3 3 1 2 1 1 3 − − − − + = − + z z z z min ( ) ( ) = H z H z ap So, ( ) 1 min 1 =3 1 2 H z z − − , ( ) 1 1 1 1 3 = 1 1 3 ap z H z z z − − − + + (5 pts) 3.(15 pts) Solution: (a) The impulse response of the Linear-Phase FIR system is h[n]=2δ[n]+3δ[n-1]-δ[n-2]+δ[n-3]+δ[n-4]-δ[n-5]+3δ[n-6]+2δ[n-7] The system function of the Linear-Phase FIR system is 1 2 3 4 5 6 7 ( ) 2+3 + + + +3 +2 − − − − − − − H z z z z z z z z = − (3pts) (b) The difference equation relating input x[n] and output y[n]: (2pts) y n x n x n x n x n x n x n x n x n [ ] 2 [ ] 3 [ 1] [ 2] [ 3] [ 4] [ 5] 3 [ 6] 2 [ 7] = + − − − + − + − − − + − + − (c) The signal flow graph of direct form structure for the FIR linear-phase system is (8pts) (d) Since the impulse response is symmetric at n=3.5 , h[7-n] = h[n] = ( ) - + 3.5 j H e The group delay of the system is: ( ) = − arg ( ) j j d grd H e H e d = − - + = 3.5 3.5 d d (2pts) 4.(20 pts) Solution: (a) (5pts) The corresponding impulse response h n diff of ( ) j H e diff : 1 ( ) 2 − = j j n diff diff h n H e e d ( ) 1 / 2 2 − − = j M j n j e e d ( ) 1 ( / 2) 2 − − = j n M j e d ( ) ( ) 1 1 ( / 2) 2 / 2 − − = − j n M j de j n M ( ) ( ) ( ) ( ) 1 1 /2 /2 2 / 2 − − − − = − − j n M j n M e e d n M