正在加载图片...
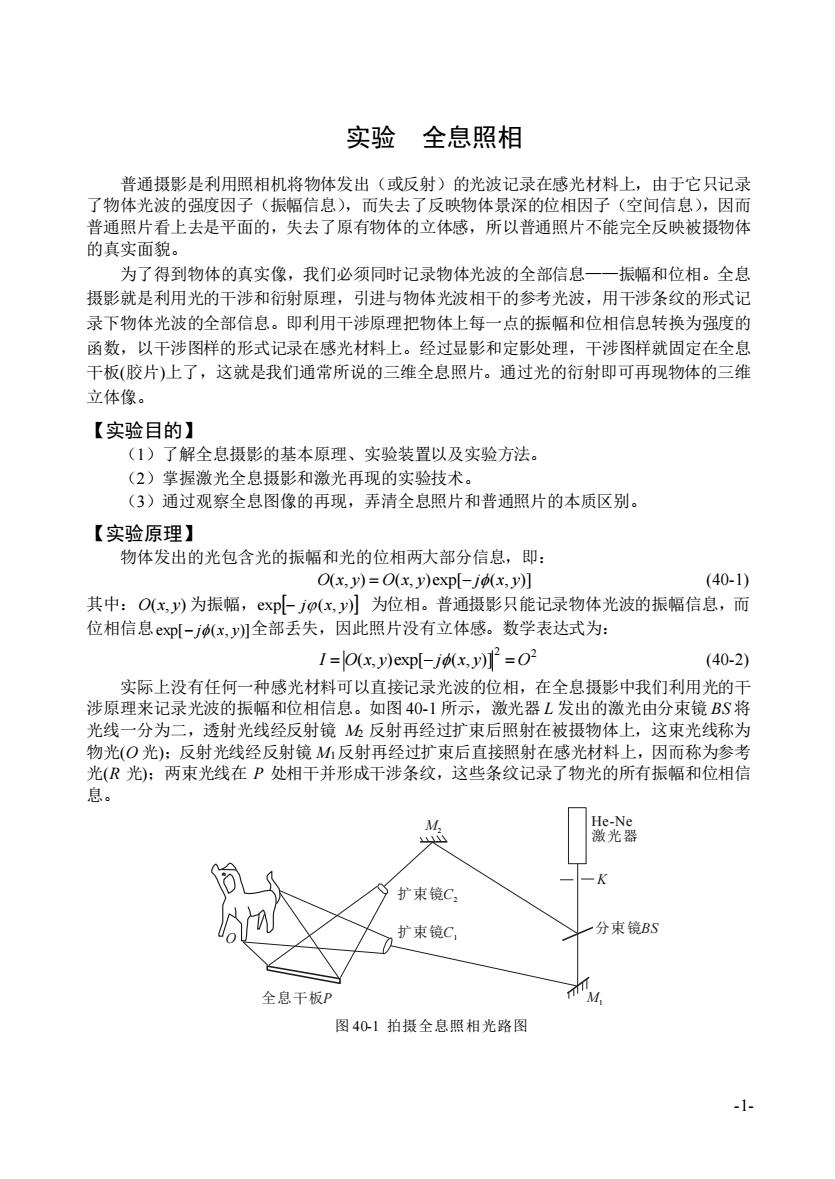
实验全息照相 普通摄影是利用照相机将物体发出(或反射)的光波记录在感光材料上,由干它只记录 了物体光波的强度因子(振幅信息),而失去了反映物体景深的位相因子(空间信息),因而 普通照片看上去是平面的,失去了原有物体的立体感,所以普通照片不能完全反映被摄物传 的真实面貌。 为了得到物体的直实像,我们必须同时记录物体光波的全部信息一一振幅和位相。全息 摄影就是利用光的干涉和衍射原理,引进与物体光波相干的参考光波,用干涉条纹的形式记 录下物体光波的全部信息。即利用干涉原理把物体上每一点的振幅和位相信息转换为强度的 函数,以干涉图样的形式记录在感光材料上。经过显影和定影处理,干涉图样就固定在全息 干板(胶片)上了,这就是我们通常所说的三维全息照片。通过光的衍射即可再现物体的三维 立体像。 【实验目的】 (1)了解全息摄影的基本原理、实验装置以及实验方法。 (2)掌握激光全息摄影和激光再现的实验技术 (3)通过观察全息图像的再现,弄清全息照片和普通照片的本质区别。 【实验原理】 物体发出的光包含光的振幅和光的位相两大部分信息,即 O(x.y)=O(x.y)exp-jo(x,y) (40-1) 其中:O(x,y)为振幅,xplj(x,y列为位相。普通摄影只能记录物体光波的振幅信息,而 位相信息xp-jx,y全部丢失,因此照片没有立体感。数学表达式为 I=O(x,y)expl-jx,y)=O2 (40-2) 实际上没有任何一种感光材料可以直接记录光波的位相,在全息摄影中我们利用光的干 涉原理来记录光波的振幅和位相信息。 如图40-1所示, 激光器L发出的激光由分束镜BS将 光线一分为二,透射光线经反射镜h反射再经过扩束后照射在被摄物体上,这束光线称为 物光(O光):反射光线经反射镜M山反射再经过扩束后直接照射在感光材料上,因而称为参考 光(R光):两束光线在P处相干并形成干涉条纹,这些条纹记录了物光的所有振幅和位相信 息。 M 激光器 扩束镜C 扩束镜C 分束镜BS 全息干板P 图40-1拍摄全息照相光路图 1 -1- 实验 全息照相 普通摄影是利用照相机将物体发出(或反射)的光波记录在感光材料上,由于它只记录 了物体光波的强度因子(振幅信息),而失去了反映物体景深的位相因子(空间信息),因而 普通照片看上去是平面的,失去了原有物体的立体感,所以普通照片不能完全反映被摄物体 的真实面貌。 为了得到物体的真实像,我们必须同时记录物体光波的全部信息——振幅和位相。全息 摄影就是利用光的干涉和衍射原理,引进与物体光波相干的参考光波,用干涉条纹的形式记 录下物体光波的全部信息。即利用干涉原理把物体上每一点的振幅和位相信息转换为强度的 函数,以干涉图样的形式记录在感光材料上。经过显影和定影处理,干涉图样就固定在全息 干板(胶片)上了,这就是我们通常所说的三维全息照片。通过光的衍射即可再现物体的三维 立体像。 【实验目的】 (1)了解全息摄影的基本原理、实验装置以及实验方法。 (2)掌握激光全息摄影和激光再现的实验技术。 (3)通过观察全息图像的再现,弄清全息照片和普通照片的本质区别。 【实验原理】 物体发出的光包含光的振幅和光的位相两大部分信息,即: O(x, y) = O(x, y)exp[− j(x, y)] (40-1) 其中: O(x, y) 为振幅, exp− j(x, y) 为位相。普通摄影只能记录物体光波的振幅信息,而 位相信息 exp[− j(x, y)] 全部丢失,因此照片没有立体感。数学表达式为: 2 2 I = O(x, y)exp[− j(x, y)] = O (40-2) 实际上没有任何一种感光材料可以直接记录光波的位相,在全息摄影中我们利用光的干 涉原理来记录光波的振幅和位相信息。如图 40-1 所示,激光器 L 发出的激光由分束镜 BS 将 光线一分为二,透射光线经反射镜 M2 反射再经过扩束后照射在被摄物体上,这束光线称为 物光(O 光);反射光线经反射镜 M1反射再经过扩束后直接照射在感光材料上,因而称为参考 光(R 光);两束光线在 P 处相干并形成干涉条纹,这些条纹记录了物光的所有振幅和位相信 息。 图 4 0-1 拍摄全息照相光路图 全息干板P 扩束镜C2 扩束镜C1 分束镜B S K He-Ne 激光器 M2 O M1