正在加载图片...
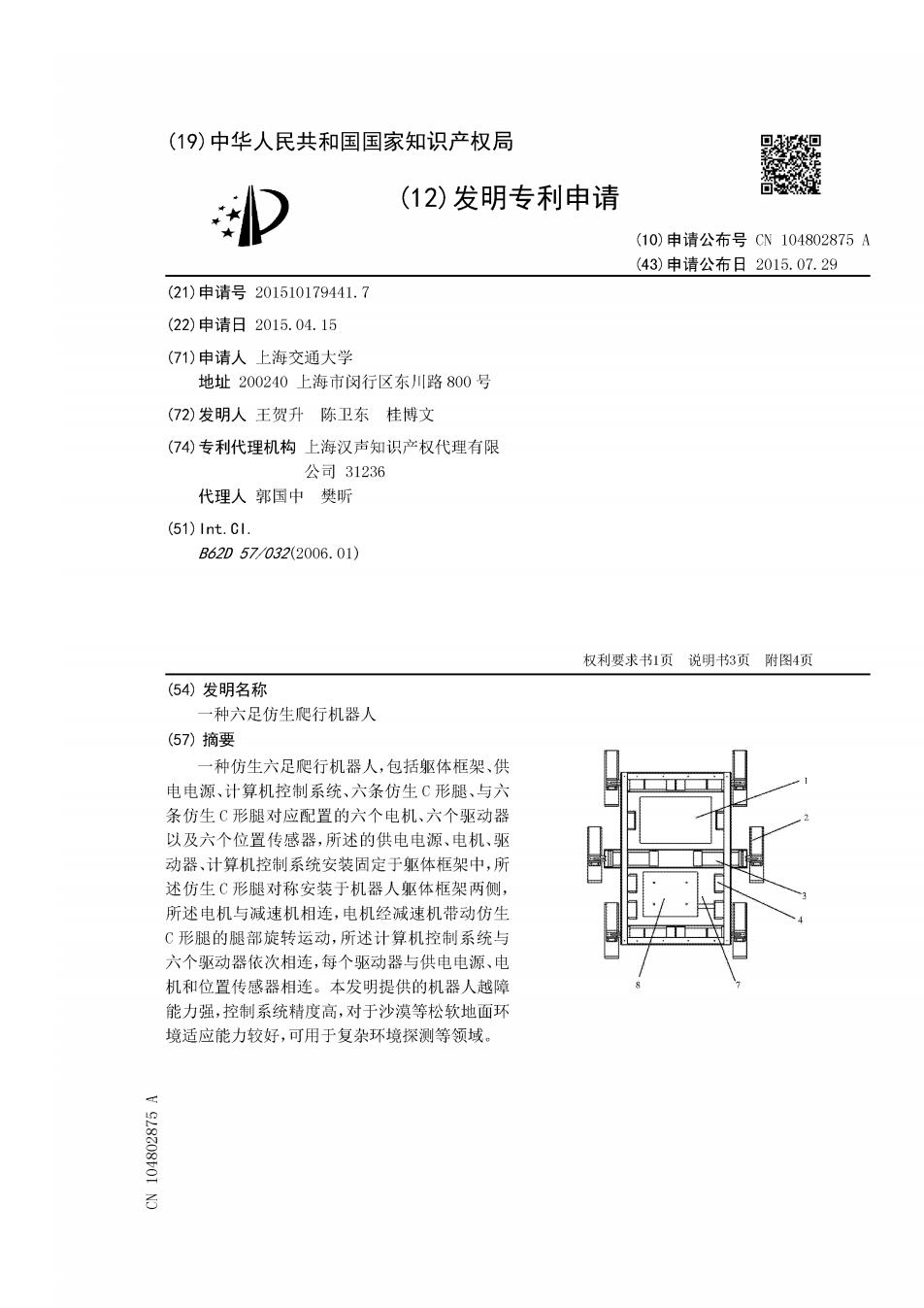
(19)中华人民共和国国家知识产权局 (12)发明专利申请 可 (10)申请公布号CN104802875A (43)申请公布日2015.07.29 (21)申请号201510179441.7 (22)申请日2015.04.15 (71)申请人上海交通大学 地址200240上海市闵行区东川路800号 (72)发明人王贺升陈卫东桂博文 (74)专利代理机构上海汉声知识产权代理有限 公司31236 代理人郭国中樊昕 (51)1nt.Cl. B62D57032(2006.01) 权利要求书1页说明书3页附图4页 (54)发明名称 一种六足仿生爬行机器人 (57)摘要 一种仿生六足爬行机器人,包括躯体框架、供 电电源、计算机控制系统、六条仿生C形腿、与六 条仿生C形腿对应配置的六个电机、六个驱动器 以及六个位置传感器,所述的供电电源、电机、驱 动器、计算机控制系统安装固定于躯体框架中,所 述仿生C形腿对称安装于机器人躯体框架两侧, 所述电机与减速机相连,电机经减速机带动仿生 C形腿的腿部旋转运动,所述计算机控制系统与 六个驱动器依次相连,每个驱动器与供电电源、电 机和位置传感器相连。本发明提供的机器人越障 能力强,控制系统精度高,对于沙漠等松软地面环 境适应能力较好,可用于复杂环境探测等领域。 7030850