正在加载图片...
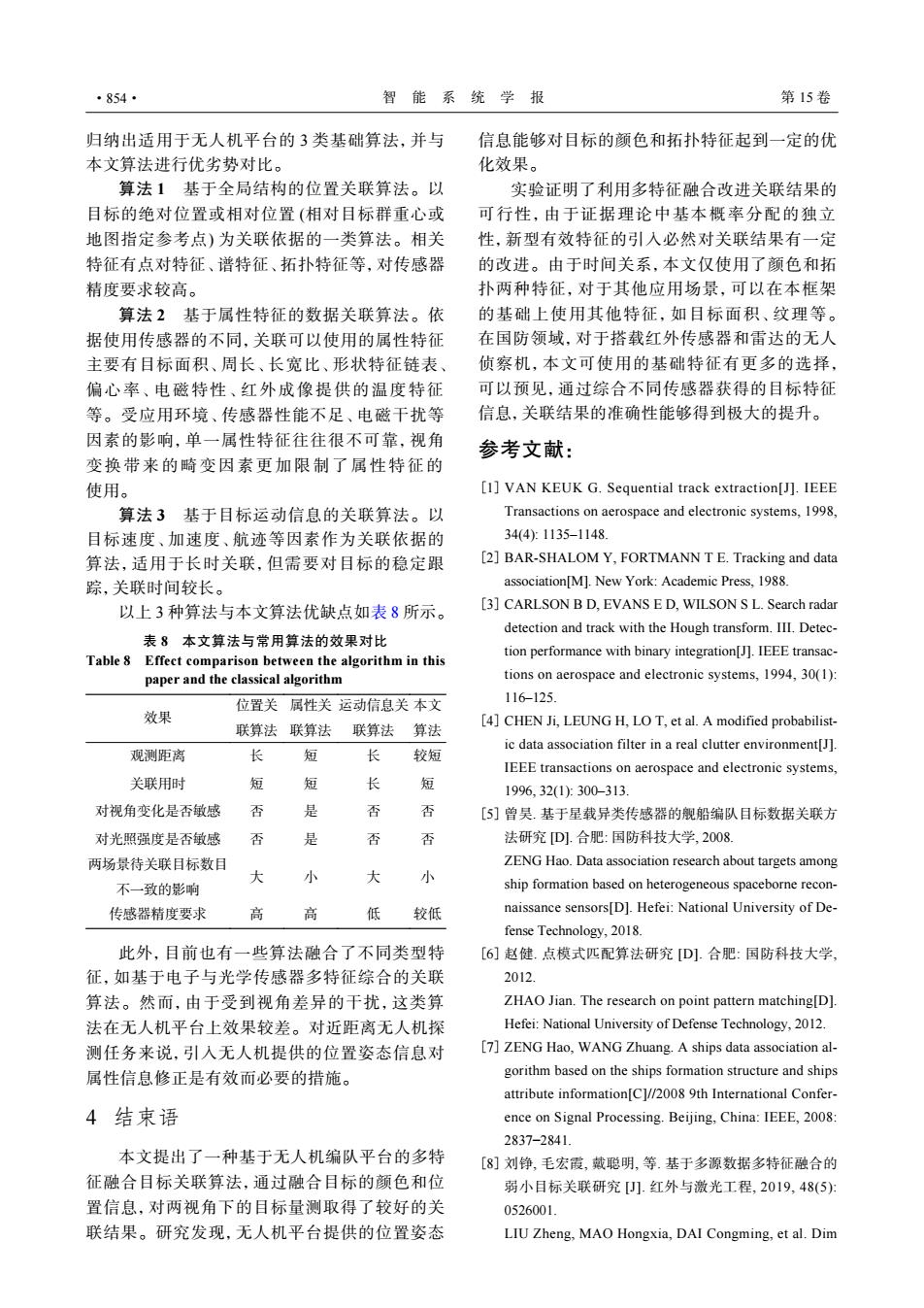
·854· 智能系统学报 第15卷 归纳出适用于无人机平台的3类基础算法,并与 信息能够对目标的颜色和拓扑特征起到一定的优 本文算法进行优劣势对比。 化效果。 算法1基于全局结构的位置关联算法。以 实验证明了利用多特征融合改进关联结果的 目标的绝对位置或相对位置(相对目标群重心或 可行性,由于证据理论中基本概率分配的独立 地图指定参考点)为关联依据的一类算法。相关 性,新型有效特征的引入必然对关联结果有一定 特征有点对特征、谱特征、拓扑特征等,对传感器 的改进。由于时间关系,本文仅使用了颜色和拓 精度要求较高。 扑两种特征,对于其他应用场景,可以在本框架 算法2基于属性特征的数据关联算法。依 的基础上使用其他特征,如目标面积、纹理等。 据使用传感器的不同,关联可以使用的属性特征 在国防领域,对于搭载红外传感器和雷达的无人 主要有目标面积、周长、长宽比、形状特征链表、 侦察机,本文可使用的基础特征有更多的选择, 偏心率、电磁特性、红外成像提供的温度特征 可以预见,通过综合不同传感器获得的目标特征 等。受应用环境、传感器性能不足、电磁干扰等 信息,关联结果的准确性能够得到极大的提升。 因素的影响,单一属性特征往往很不可靠,视角 参考文献: 变换带来的畸变因素更加限制了属性特征的 使用。 [1]VAN KEUK G.Sequential track extraction[J].IEEE 算法3基于目标运动信息的关联算法。以 Transactions on aerospace and electronic systems,1998, 目标速度、加速度、航迹等因素作为关联依据的 344):1135-1148. 算法,适用于长时关联,但需要对目标的稳定跟 [2]BAR-SHALOM Y,FORTMANN T E.Tracking and data 踪,关联时间较长。 association[M].New York:Academic Press,1988. 以上3种算法与本文算法优缺点如表8所示。 [3]CARLSON B D,EVANS E D,WILSON S L.Search radar detection and track with the Hough transform.III.Detec- 表8本文算法与常用算法的效果对比 Table 8 Effect comparison between the algorithm in this tion performance with binary integration[J].IEEE transac- paper and the classical algorithm tions on aerospace and electronic systems,1994,30(1): 位置关属性关运动信息关本文 116-125 效果 [4]CHEN Ji,LEUNG H.LO T,et al.A modified probabilist- 联算法联算法联算法算法 ic data association filter in a real clutter environment[J]. 观测距离 长 短 长 较短 IEEE transactions on aerospace and electronic systems, 关联用时 短 短 长 短 1996,32(1)300-313. 对视角变化是否敏感 否 是 否 否 [5]曾吴.基于星载异类传感器的舰船编队目标数据关联方 对光照强度是否敏感 否 是 否 否 法研究D1.合肥:国防科技大学,2008。 两场景待关联目标数目 ZENG Hao.Data association research about targets among 大 小 大 小 不一致的影响 ship formation based on heterogeneous spaceborne recon- 传感器精度要求 高 高 低 较低 naissance sensors[D].Hefei:National University of De- fense Technology,2018 此外,目前也有一些算法融合了不同类型特 [6]赵健.点模式匹配算法研究D1.合肥:国防科技大学」 征,如基于电子与光学传感器多特征综合的关联 2012 算法。然而,由于受到视角差异的干扰,这类算 ZHAO Jian.The research on point pattern matching[D]. 法在无人机平台上效果较差。对近距离无人机探 Hefei:National University of Defense Technology,2012 测任务来说,引入无人机提供的位置姿态信息对 [7]ZENG Hao,WANG Zhuang.A ships data association al- 属性信息修正是有效而必要的措施。 gorithm based on the ships formation structure and ships attribute information[C]//2008 9th International Confer- 4结束语 ence on Signal Processing.Beijing.China:IEEE,2008: 2837-2841. 本文提出了一种基于无人机编队平台的多特 [8]刘铮,毛宏霞,戴聪明,等.基于多源数据多特征融合的 征融合目标关联算法,通过融合目标的颜色和位 弱小目标关联研究].红外与激光工程,2019,48(5): 置信息,对两视角下的目标量测取得了较好的关 0526001. 联结果。研究发现,无人机平台提供的位置姿态 LIU Zheng,MAO Hongxia,DAI Congming,et al.Dim归纳出适用于无人机平台的 3 类基础算法,并与 本文算法进行优劣势对比。 算法 1 基于全局结构的位置关联算法。以 目标的绝对位置或相对位置 (相对目标群重心或 地图指定参考点) 为关联依据的一类算法。相关 特征有点对特征、谱特征、拓扑特征等,对传感器 精度要求较高。 算法 2 基于属性特征的数据关联算法。依 据使用传感器的不同,关联可以使用的属性特征 主要有目标面积、周长、长宽比、形状特征链表、 偏心率、电磁特性、红外成像提供的温度特征 等。受应用环境、传感器性能不足、电磁干扰等 因素的影响,单一属性特征往往很不可靠,视角 变换带来的畸变因素更加限制了属性特征的 使用。 算法 3 基于目标运动信息的关联算法。以 目标速度、加速度、航迹等因素作为关联依据的 算法,适用于长时关联,但需要对目标的稳定跟 踪,关联时间较长。 以上 3 种算法与本文算法优缺点如表 8 所示。 表 8 本文算法与常用算法的效果对比 Table 8 Effect comparison between the algorithm in this paper and the classical algorithm 效果 位置关 联算法 属性关 联算法 运动信息关 联算法 本文 算法 观测距离 长 短 长 较短 关联用时 短 短 长 短 对视角变化是否敏感 否 是 否 否 对光照强度是否敏感 否 是 否 否 两场景待关联目标数目 不一致的影响 大 小 大 小 传感器精度要求 高 高 低 较低 此外,目前也有一些算法融合了不同类型特 征,如基于电子与光学传感器多特征综合的关联 算法。然而,由于受到视角差异的干扰,这类算 法在无人机平台上效果较差。对近距离无人机探 测任务来说,引入无人机提供的位置姿态信息对 属性信息修正是有效而必要的措施。 4 结束语 本文提出了一种基于无人机编队平台的多特 征融合目标关联算法,通过融合目标的颜色和位 置信息,对两视角下的目标量测取得了较好的关 联结果。研究发现,无人机平台提供的位置姿态 信息能够对目标的颜色和拓扑特征起到一定的优 化效果。 实验证明了利用多特征融合改进关联结果的 可行性,由于证据理论中基本概率分配的独立 性,新型有效特征的引入必然对关联结果有一定 的改进。由于时间关系,本文仅使用了颜色和拓 扑两种特征,对于其他应用场景,可以在本框架 的基础上使用其他特征,如目标面积、纹理等。 在国防领域,对于搭载红外传感器和雷达的无人 侦察机,本文可使用的基础特征有更多的选择, 可以预见,通过综合不同传感器获得的目标特征 信息,关联结果的准确性能够得到极大的提升。 参考文献: VAN KEUK G. Sequential track extraction[J]. IEEE Transactions on aerospace and electronic systems, 1998, 34(4): 1135–1148. [1] BAR-SHALOM Y, FORTMANN T E. Tracking and data association[M]. New York: Academic Press, 1988. [2] CARLSON B D, EVANS E D, WILSON S L. Search radar detection and track with the Hough transform. III. Detection performance with binary integration[J]. IEEE transactions on aerospace and electronic systems, 1994, 30(1): 116–125. [3] CHEN Ji, LEUNG H, LO T, et al. A modified probabilistic data association filter in a real clutter environment[J]. IEEE transactions on aerospace and electronic systems, 1996, 32(1): 300–313. [4] 曾昊. 基于星载异类传感器的舰船编队目标数据关联方 法研究 [D]. 合肥: 国防科技大学, 2008. ZENG Hao. Data association research about targets among ship formation based on heterogeneous spaceborne reconnaissance sensors[D]. Hefei: National University of Defense Technology, 2018. [5] 赵健. 点模式匹配算法研究 [D]. 合肥: 国防科技大学, 2012. ZHAO Jian. The research on point pattern matching[D]. Hefei: National University of Defense Technology, 2012. [6] ZENG Hao, WANG Zhuang. A ships data association algorithm based on the ships formation structure and ships attribute information[C]//2008 9th International Conference on Signal Processing. Beijing, China: IEEE, 2008: 2837−2841. [7] 刘铮, 毛宏霞, 戴聪明, 等. 基于多源数据多特征融合的 弱小目标关联研究 [J]. 红外与激光工程, 2019, 48(5): 0526001. LIU Zheng, MAO Hongxia, DAI Congming, et al. Dim [8] ·854· 智 能 系 统 学 报 第 15 卷