正在加载图片...
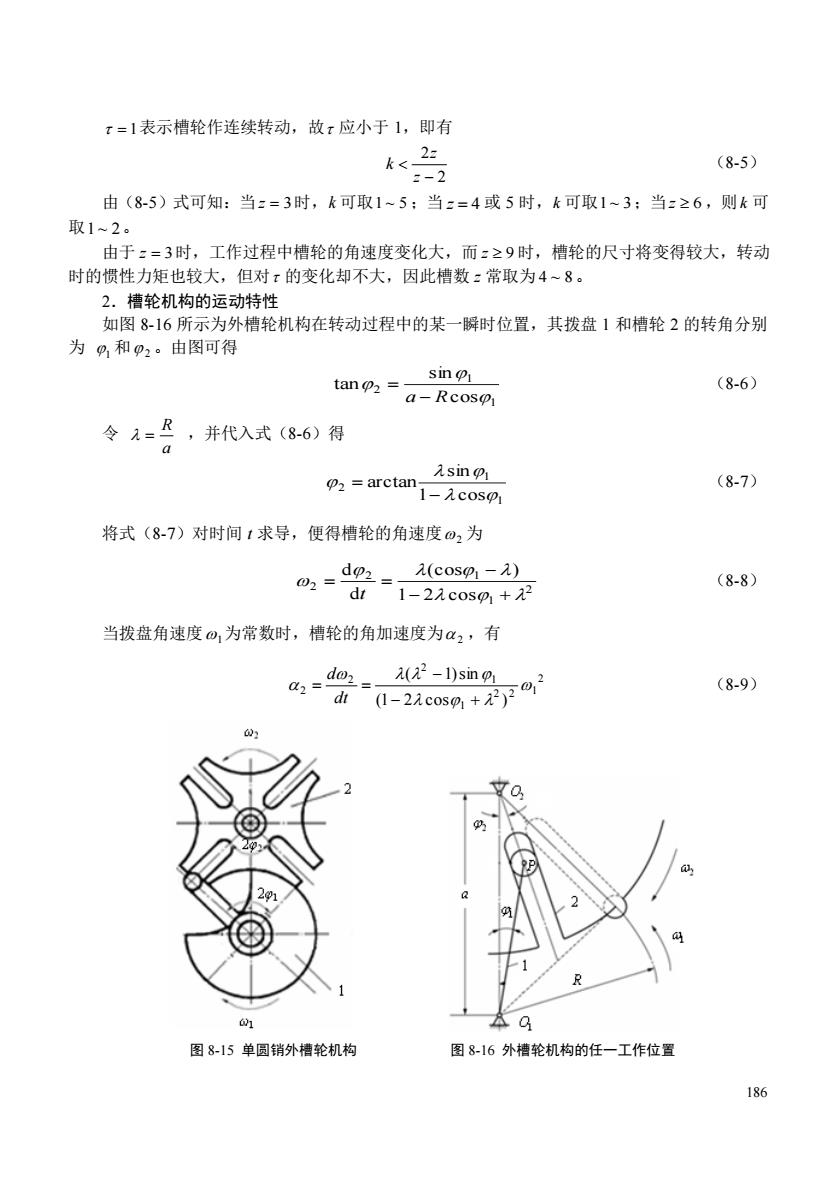
r=1表示槽轮作连续转动,故:应小于1,即有 k2-2 22 (8-5) 由(85)式可知:当:=3时,k可取1~5:当:=4或5时,k可取1~3:当:≥6,则k可 取1~2。 由于:=3时,工作过程中槽轮的角速度变化大,而:≥9时,槽轮的尺寸将变得较大,转动 时的惯性力矩也较大,但对:的变化却不大,因此槽数:常取为4~8。 2.槽轮机构的运动特性 如图816所示为外槽轮机构在转动过程中的某一瞬时位置,其拨盘1和槽轮2的转角分别 为9,和2。由图可得 sino tan 2 a-Rcoso (8-6) 令1=尽,并代入式(8-6)得 元sinp1 2=arctan1-cos (8-7) 将式(8-7)对时间1求导,便得槽轮的角速度©2为 -0o 1(Cosp1-2) (8-8) 当拨盘角速度⊙,为常数时,槽轮的角加速度为a2,有 (-1)sino (1-2zcos+ (8-9) 1 图8-15单圆销外槽轮机构 图816外槽轮机构的任一工作位置 186 186 = 1 表示槽轮作连续转动,故 应小于 1,即有 2 2 − z z k (8-5) 由(8-5)式可知:当 z = 3 时, k 可取 1 ~ 5 ;当 z = 4 或 5 时, k 可取 1 ~ 3 ;当 z 6 ,则 k 可 取 1 ~ 2。 由于 z = 3 时,工作过程中槽轮的角速度变化大,而 z 9 时,槽轮的尺寸将变得较大,转动 时的惯性力矩也较大,但对 的变化却不大,因此槽数 z 常取为 4 ~ 8。 2.槽轮机构的运动特性 如图 8-16 所示为外槽轮机构在转动过程中的某一瞬时位置,其拨盘 1 和槽轮 2 的转角分别 为 1 和 2 。由图可得 1 1 2 cos sin tan a − R = (8-6) 令 a R = ,并代入式(8-6)得 1 1 2 1 cos sin arctan − = (8-7) 将式(8-7)对时间 t 求导,便得槽轮的角速度 2 为 2 1 2 1 2 1 2 cos (cos ) d d − + − = = t (8-8) 当拨盘角速度 1 为常数时,槽轮的角加速度为 2 ,有 2 1 2 2 1 1 2 2 2 (1 2 cos ) ( 1)sin − + − = = dt d (8-9) 图 8-15 单圆销外槽轮机构 图 8-16 外槽轮机构的任一工作位置