正在加载图片...
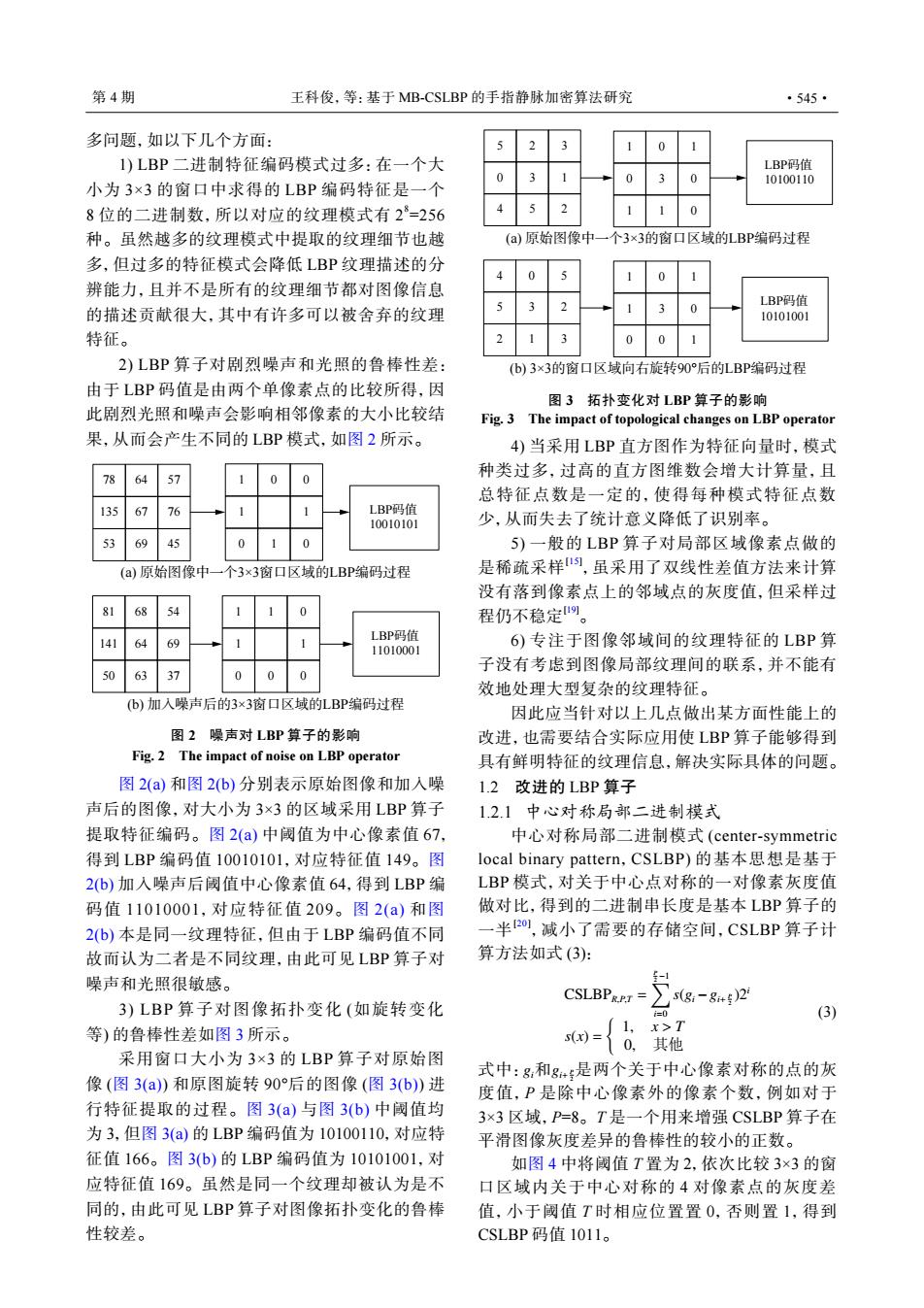
第4期 王科俊,等:基于MB-CSLBP的手指静脉加密算法研究 ·545· 多问题,如以下几个方面: 1)LBP二进制特征编码模式过多:在一个大 LBP码值 10100110 小为3×3的窗口中求得的LBP编码特征是一个 8位的二进制数,所以对应的纹理模式有2=256 种。虽然越多的纹理模式中提取的纹理细节也越 (a)原始图像中一个3×3的窗口区域的LBP编码过程 多,但过多的特征模式会降低LBP纹理描述的分 辨能力,且并不是所有的纹理细节都对图像信息 LBP码值 的描述贡献很大,其中有许多可以被舍弃的纹理 10101001 特征。 2)LBP算子对剧烈噪声和光照的鲁棒性差: (b)3×3的窗口区域向右旋转90°后的LBP编码过程 由于LBP码值是由两个单像素点的比较所得,因 图3拓扑变化对LBP算子的影响 此剧烈光照和噪声会影响相邻像素的大小比较结 Fig.3 The impact of topological changes on LBP operator 果,从而会产生不同的LBP模式,如图2所示。 4)当采用LBP直方图作为特征向量时,模式 64 57 种类过多,过高的直方图维数会增大计算量,且 总特征点数是一定的,使得每种模式特征点数 135 67 16 LBP码值 10010101 少,从而失去了统计意义降低了识别率。 53 69 45 0 5)一般的LBP算子对局部区域像素点做的 (a)原始图像中 一个3×3窗口区域的LBP编码过程 是稀疏采样,虽采用了双线性差值方法来计算 没有落到像素点上的邻域点的灰度值,但采样过 81 68 程仍不稳定。 LBP码值 141 64 69 6)专注于图像邻域间的纹理特征的LBP算 11010001 子没有考虑到图像局部纹理间的联系,并不能有 50 63 0 0 效地处理大型复杂的纹理特征。 (b)加入噪声后的3×3窗口区域的LBP编码过程 因此应当针对以上几点做出某方面性能上的 图2噪声对LBP算子的影响 改进,也需要结合实际应用使LBP算子能够得到 Fig.2 The impact of noise on LBP operator 具有鲜明特征的纹理信息,解决实际具体的问题。 图2(a)和图2(b)分别表示原始图像和加入噪 1.2改进的LBP算子 声后的图像,对大小为3×3的区域采用LBP算子 1.2.1中心对称局部二进制模式 提取特征编码。图2(a)中阈值为中心像素值67, 中心对称局部二进制模式(center-symmetric 得到LBP编码值10010101,对应特征值149。图 local binary pattern,CSLBP)的基本思想是基于 2(b)加入噪声后阈值中心像素值64,得到LBP编 LBP模式,对关于中心点对称的一对像素灰度值 码值11010001,对应特征值209。图2(a)和图 做对比,得到的二进制串长度是基本LBP算子的 2(b)本是同一纹理特征,但由于LBP编码值不同 一半2o,减小了需要的存储空间,CSLBP算子计 故而认为二者是不同纹理,由此可见LBP算子对 算方法如式(3): 噪声和光照很敏感。 -1 CSLBP&ET= s(g-84)2 3)LBP算子对图像拓扑变化(如旋转变化 =0 (3) 等)的鲁棒性差如图3所示。 1, x>T s=0其他 采用窗口大小为3×3的LBP算子对原始图 式中:g:和g4:是两个关于中心像素对称的点的灰 像(图3(a)和原图旋转90°后的图像(图3(b)进 度值,P是除中心像素外的像素个数,例如对于 行特征提取的过程。图3(a)与图3(b)中阈值均 3×3区域,P=8。T是一个用来增强CSLBP算子在 为3,但图3(a)的LBP编码值为10100110,对应特 平滑图像灰度差异的鲁棒性的较小的正数。 征值166。图3(b)的LBP编码值为10101001,对 如图4中将阈值T置为2,依次比较3×3的窗 应特征值169。虽然是同一个纹理却被认为是不 口区域内关于中心对称的4对像素点的灰度差 同的,由此可见LBP算子对图像拓扑变化的鲁棒 值,小于阈值T时相应位置置0,否则置1,得到 性较差。 CSLBP码值1011。多问题,如以下几个方面: 1) LBP 二进制特征编码模式过多:在一个大 小为 3×3 的窗口中求得的 LBP 编码特征是一个 8 位的二进制数,所以对应的纹理模式有 2 8 =256 种。虽然越多的纹理模式中提取的纹理细节也越 多,但过多的特征模式会降低 LBP 纹理描述的分 辨能力,且并不是所有的纹理细节都对图像信息 的描述贡献很大,其中有许多可以被舍弃的纹理 特征。 2) LBP 算子对剧烈噪声和光照的鲁棒性差: 由于 LBP 码值是由两个单像素点的比较所得,因 此剧烈光照和噪声会影响相邻像素的大小比较结 果,从而会产生不同的 LBP 模式,如图 2 所示。 (a) 原始图像中一个3×3窗口区域的LBP编码过程 (b) 加入噪声后的3×3窗口区域的LBP编码过程 78 64 57 135 67 76 53 69 45 LBP码值 10010101 1 0 0 1 1 0 1 0 81 68 54 141 64 69 50 63 37 LBP码值 11010001 1 1 0 1 1 0 0 0 图 2 噪声对 LBP 算子的影响 Fig. 2 The impact of noise on LBP operator 图 2(a) 和图 2(b) 分别表示原始图像和加入噪 声后的图像,对大小为 3×3 的区域采用 LBP 算子 提取特征编码。图 2(a) 中阈值为中心像素值 67, 得到 LBP 编码值 10010101,对应特征值 149。图 2(b) 加入噪声后阈值中心像素值 64,得到 LBP 编 码值 11010001,对应特征值 209。图 2(a) 和图 2(b) 本是同一纹理特征,但由于 LBP 编码值不同 故而认为二者是不同纹理,由此可见 LBP 算子对 噪声和光照很敏感。 3) LBP 算子对图像拓扑变化 (如旋转变化 等) 的鲁棒性差如图 3 所示。 采用窗口大小为 3×3 的 LBP 算子对原始图 像 (图 3(a)) 和原图旋转 90°后的图像 (图 3(b)) 进 行特征提取的过程。图 3(a) 与图 3(b) 中阈值均 为 3,但图 3(a) 的 LBP 编码值为 10100110,对应特 征值 166。图 3(b) 的 LBP 编码值为 10101001,对 应特征值 169。虽然是同一个纹理却被认为是不 同的,由此可见 LBP 算子对图像拓扑变化的鲁棒 性较差。 4 0 5 5 3 2 2 1 3 LBP码值 10101001 (a) 原始图像中一个3×3的窗口区域的LBP编码过程 (b) 3×3的窗口区域向右旋转90°后的LBP编码过程 1 0 1 1 3 0 0 0 1 5 2 3 0 3 1 4 5 2 LBP码值 10100110 1 0 1 0 3 0 1 1 0 图 3 拓扑变化对 LBP 算子的影响 Fig. 3 The impact of topological changes on LBP operator 4) 当采用 LBP 直方图作为特征向量时,模式 种类过多,过高的直方图维数会增大计算量,且 总特征点数是一定的,使得每种模式特征点数 少,从而失去了统计意义降低了识别率。 5) 一般的 LBP 算子对局部区域像素点做的 是稀疏采样[15] ,虽采用了双线性差值方法来计算 没有落到像素点上的邻域点的灰度值,但采样过 程仍不稳定[19]。 6) 专注于图像邻域间的纹理特征的 LBP 算 子没有考虑到图像局部纹理间的联系,并不能有 效地处理大型复杂的纹理特征。 因此应当针对以上几点做出某方面性能上的 改进,也需要结合实际应用使 LBP 算子能够得到 具有鲜明特征的纹理信息,解决实际具体的问题。 1.2 改进的 LBP 算子 1.2.1 中心对称局部二进制模式 中心对称局部二进制模式 (center-symmetric local binary pattern,CSLBP) 的基本思想是基于 LBP 模式,对关于中心点对称的一对像素灰度值 做对比,得到的二进制串长度是基本 LBP 算子的 一半[20] ,减小了需要的存储空间,CSLBP 算子计 算方法如式 (3): CSLBPR,P,T = P 2∑−1 i=0 s(gi −gi+ P 2 )2i s(x) = { 1, x > T 0, 其他 (3) gi gi+ P 式中: 和 2是两个关于中心像素对称的点的灰 度值,P 是除中心像素外的像素个数,例如对于 3×3 区域,P=8。T 是一个用来增强 CSLBP 算子在 平滑图像灰度差异的鲁棒性的较小的正数。 如图 4 中将阈值 T 置为 2,依次比较 3×3 的窗 口区域内关于中心对称的 4 对像素点的灰度差 值,小于阈值 T 时相应位置置 0,否则置 1,得到 CSLBP 码值 1011。 第 4 期 王科俊,等:基于 MB-CSLBP 的手指静脉加密算法研究 ·545·