正在加载图片...
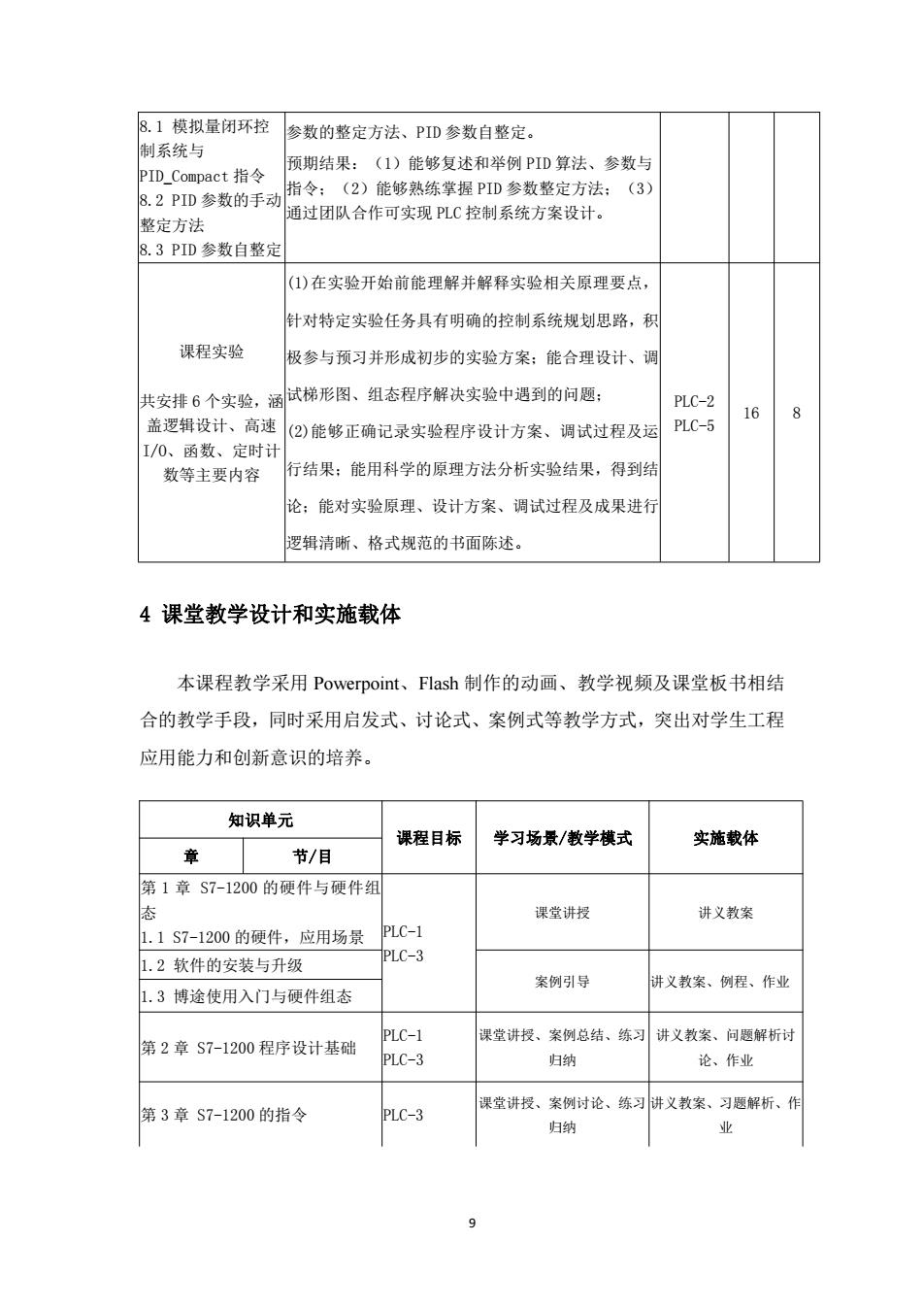
⑧.1模拟量闭环控 参数的整定方法、PID参数自整定。 制系统与 PID_Compact指令 预期结果:(1)能够复述和举例PID算法、参数与 8.2PID参数的手动 指令:(2)能够熟练掌握PID参数整定方法:(3) 通过团队合作可实现PLC控制系统方案设计。 整定方法 .3PID参数自整定 (1)在实验开始前能理解并解释实验相关原理要点, 针对特定实验任务具有明确的控制系统规划思路,积 课程实验 极参与预习并形成初步的实验方案:能合理设计、调 共安排6个实验,洒试梯形图、组态程序解决实验中海到的问题: PLC-2 16 8 盖污组设计、高速 (2)能够正确记录实验程序设计方案、调试过程及运 PLC-5 I/0 函数、定时: 数等主要内容 行结果;能用科学的原理方法分析实验结果,得到细 论:能对实验原理、设计方案、调试过程及成果进 逻辑清晰、格式规范的书面陈述。 4课堂教学设计和实施载体 本课程教学采用Powerpoint、.Flash制作的动画、教学视频及课堂板书相结 合的教学手段,同时采用启发式、讨论式、案例式等教学方式,突出对学生工程 应用能力和创新意识的培养 知识单元 课程目标 学习场景/徽学棋式 实施载体 章 节/目 第1章S7-1200的硬件与硬件组 课堂讲授 讲义教案 1.1S7-1200的硬件,应用场景 PLC-1 PIC-3 1.2软件的安装与升级 1.3博途使用入门与硬件组态 案例引导 井义教案、例程、作 L.C-1 堂讲授、案例总结、练习 讲义教案、间解析 第2章S7-1200程序设计基础 PLC-3 归钠 论、作业 3章S7-1200的指令 LC-3 果堂讲授、案例讨论、练习义教案、习题解析、作 归纳9 8.1 模拟量闭环控 制系统与 PID_Compact 指令 8.2 PID 参数的手动 整定方法 8.3 PID 参数自整定 参数的整定方法、PID 参数自整定。 预期结果:(1)能够复述和举例 PID 算法、参数与 指令;(2)能够熟练掌握 PID 参数整定方法;(3) 通过团队合作可实现 PLC 控制系统方案设计。 课程实验 共安排 6 个实验,涵 盖逻辑设计、高速 I/O、函数、定时计 数等主要内容 (1)在实验开始前能理解并解释实验相关原理要点, 针对特定实验任务具有明确的控制系统规划思路,积 极参与预习并形成初步的实验方案;能合理设计、调 试梯形图、组态程序解决实验中遇到的问题; (2)能够正确记录实验程序设计方案、调试过程及运 行结果;能用科学的原理方法分析实验结果,得到结 论;能对实验原理、设计方案、调试过程及成果进行 逻辑清晰、格式规范的书面陈述。 PLC-2 PLC-5 16 8 4 课堂教学设计和实施载体 本课程教学采用 Powerpoint、Flash 制作的动画、教学视频及课堂板书相结 合的教学手段,同时采用启发式、讨论式、案例式等教学方式,突出对学生工程 应用能力和创新意识的培养。 知识单元 课程目标 学习场景/教学模式 实施载体 章 节/目 第 1 章 S7-1200 的硬件与硬件组 态 1.1 S7-1200 的硬件,应用场景 PLC-1 PLC-3 课堂讲授 讲义教案 1.2 软件的安装与升级 案例引导 讲义教案、例程、作业 1.3 博途使用入门与硬件组态 第 2 章 S7-1200 程序设计基础 PLC-1 PLC-3 课堂讲授、案例总结、练习 归纳 讲义教案、问题解析讨 论、作业 第 3 章 S7-1200 的指令 PLC-3 课堂讲授、案例讨论、练习 归纳 讲义教案、习题解析、作 业