正在加载图片...
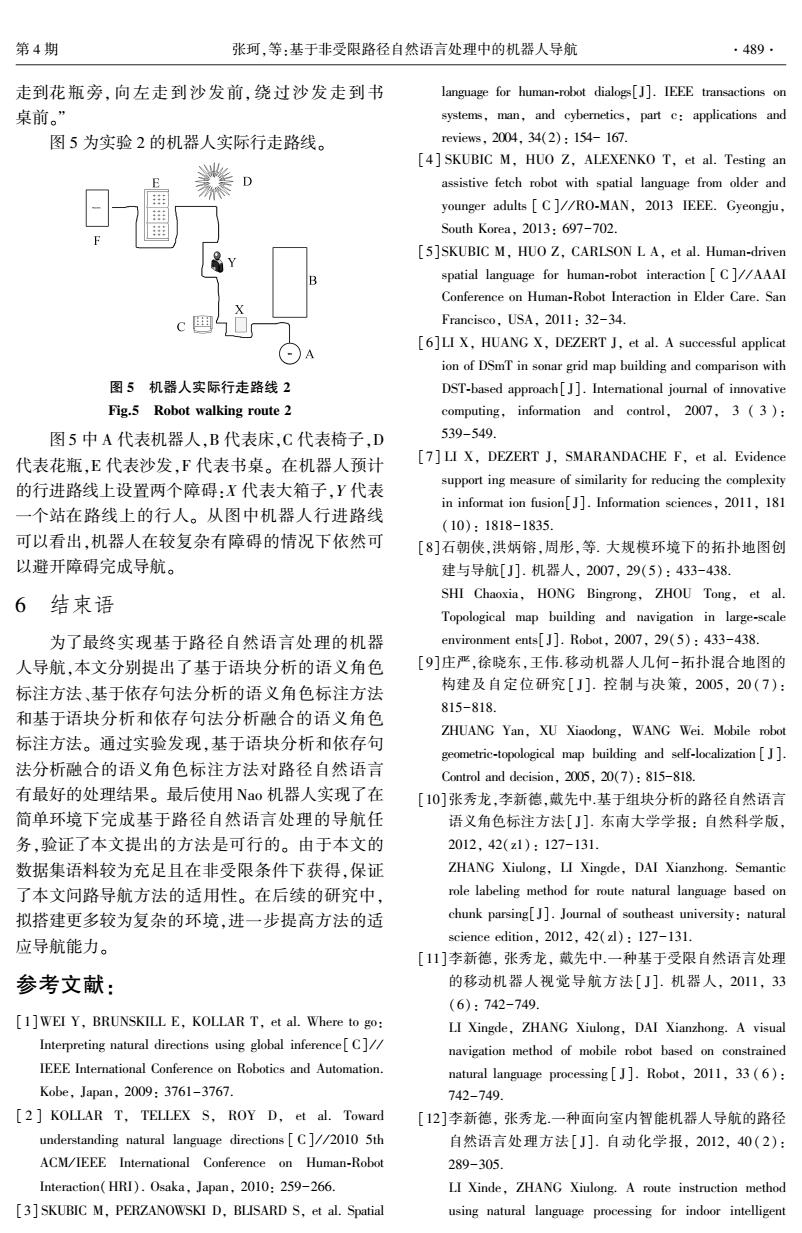
第4期 张珂,等:基于非受限路径自然语言处理中的机器人导航 ·489 走到花瓶旁,向左走到沙发前,绕过沙发走到书 language for human-robot dialogs[J].IEEE transactions on 桌前。” systems,man,and cybernetics,part c:applications and 图5为实验2的机器人实际行走路线。 reviews,2004,34(2):154-167. [4]SKUBIC M,HUO Z,ALEXENKO T,et al.Testing an D assistive fetch robot with spatial language from older and younger adults C ]//RO-MAN,2013 IEEE.Gyeongju, South Korea,2013:697-702. [5]SKUBIC M,HUO Z,CARLSON L A,et al.Human-driven B spatial language for human-robot interaction [C]//AAAI Conference on Human-Robot Interaction in Elder Care.San C Francisco,USA,2011:32-34. [6]LI X,HUANG X,DEZERT J,et al.A successful applicat ion of DSmT in sonar grid map building and comparison with 图5机器人实际行走路线2 DST-based approach[J].International journal of innovative Fig.5 Robot walking route 2 computing,information and control,2007,3 (3): 图5中A代表机器人,B代表床,C代表椅子,D 539-549. 代表花瓶,E代表沙发,F代表书桌。在机器人预计 [7]LI X,DEZERT J,SMARANDACHE F,et al.Evidence 的行进路线上设置两个障碍:X代表大箱子,Y代表 support ing measure of similarity for reducing the complexity in informat ion fusion[J.Information sciences,2011,181 一个站在路线上的行人。从图中机器人行进路线 (10):1818-1835. 可以看出,机器人在较复杂有障碍的情况下依然可 [8]石朝侠,洪炳镕,周彤,等.大规模环境下的拓扑地图创 以避开障碍完成导航。 建与导航[J].机器人,2007,29(5):433-438. 6结束语 SHI Chaoxia,HONG Bingrong,ZHOU Tong,et al. Topological map building and navigation in large-scale 为了最终实现基于路径自然语言处理的机器 environment ents[J].Robot,2007,29(5):433-438. 人导航,本文分别提出了基于语块分析的语义角色 [9]庄严,徐晓东,王伟.移动机器人几何-拓扑混合地图的 标注方法、基于依存句法分析的语义角色标注方法 构建及自定位研究[J].控制与决策,2005,20(7): 815-818. 和基于语块分析和依存句法分析融合的语义角色 ZHUANG Yan,XU Xiaodong,WANG Wei.Mobile robot 标注方法。通过实验发现,基于语块分析和依存句 geometric-topological map building and self-localization[J]. 法分析融合的语义角色标注方法对路径自然语 Control and decision,2005,20(7):815-818. 有最好的处理结果。最后使用Nao机器人实现了在 [10]张秀龙,李新德,戴先中基于组块分析的路径自然语言 简单环境下完成基于路径自然语言处理的导航任 语义角色标注方法[J].东南大学学报:自然科学版, 务,验证了本文提出的方法是可行的。由于本文的 2012,42(z1):127-131. 数据集语料较为充足且在非受限条件下获得,保证 ZHANG Xiulong,LI Xingde,DAI Xianzhong.Semantic 了本文问路导航方法的适用性。在后续的研究中, role labeling method for route natural language based on 拟搭建更多较为复杂的环境,进一步提高方法的适 chunk parsing[J].Journal of southeast university:natural 应导航能力。 science edition,2012,42(zl):127-131. [11]李新德,张秀龙,戴先中.一种基于受限自然语言处理 参考文献: 的移动机器人视觉导航方法[J].机器人,2011,33 (6):742-749. [1]WEI Y,BRUNSKILL E,KOLLAR T,et al.Where to go: LI Xingde,ZHANG Xiulong,DAI Xianzhong.A visual Interpreting natural directions using global inference[C]// navigation method of mobile robot based on constrained IEEE International Conference on Robotics and Automation. natural language processing J].Robot,2011,33(6): Kobe,Japan,2009:3761-3767. 742-749. [2]KOLLAR T,TELLEX S,ROY D,et al.Toward [12]李新德,张秀龙.一种面向室内智能机器人导航的路径 understanding natural language directions[C]//2010 5th 自然语言处理方法[J].自动化学报,2012,40(2): ACM/IEEE International Conference on Human-Robot 289-305. Interaction(HRI).Osaka,Japan,2010:259-266. LI Xinde,ZHANG Xiulong.A route instruction method 3]SKUBIC M,PERZANOWSKI D,BLISARD S,et al.Spatial using natural language processing for indoor intelligent走到花瓶旁, 向左走到沙发前, 绕过沙发走到书 桌前。” 图 5 为实验 2 的机器人实际行走路线。 图 5 机器人实际行走路线 2 Fig.5 Robot walking route 2 图 5 中 A 代表机器人,B 代表床,C 代表椅子,D 代表花瓶,E 代表沙发,F 代表书桌。 在机器人预计 的行进路线上设置两个障碍:X 代表大箱子,Y 代表 一个站在路线上的行人。 从图中机器人行进路线 可以看出,机器人在较复杂有障碍的情况下依然可 以避开障碍完成导航。 6 结束语 为了最终实现基于路径自然语言处理的机器 人导航,本文分别提出了基于语块分析的语义角色 标注方法、基于依存句法分析的语义角色标注方法 和基于语块分析和依存句法分析融合的语义角色 标注方法。 通过实验发现,基于语块分析和依存句 法分析融合的语义角色标注方法对路径自然语言 有最好的处理结果。 最后使用 Nao 机器人实现了在 简单环境下完成基于路径自然语言处理的导航任 务,验证了本文提出的方法是可行的。 由于本文的 数据集语料较为充足且在非受限条件下获得,保证 了本文问路导航方法的适用性。 在后续的研究中, 拟搭建更多较为复杂的环境,进一步提高方法的适 应导航能力。 参考文献: [1]WEI Y, BRUNSKILL E, KOLLAR T, et al. Where to go: Interpreting natural directions using global inference[C] / / IEEE International Conference on Robotics and Automation. Kobe, Japan, 2009: 3761-3767. [ 2 ] KOLLAR T, TELLEX S, ROY D, et al. Toward understanding natural language directions [ C] / / 2010 5th ACM/ IEEE International Conference on Human⁃Robot Interaction(HRI). Osaka, Japan, 2010: 259-266. [3] SKUBIC M, PERZANOWSKI D, BLISARD S, et al. Spatial language for human⁃robot dialogs[J]. IEEE transactions on systems, man, and cybernetics, part c: applications and reviews, 2004, 34(2): 154- 167. [4] SKUBIC M, HUO Z, ALEXENKO T, et al. Testing an assistive fetch robot with spatial language from older and younger adults [ C ] / / RO⁃MAN, 2013 IEEE. Gyeongju, South Korea, 2013: 697-702. [5]SKUBIC M, HUO Z, CARLSON L A, et al. Human⁃driven spatial language for human⁃robot interaction [ C] / / AAAI Conference on Human⁃Robot Interaction in Elder Care. San Francisco, USA, 2011: 32-34. [6]LI X, HUANG X, DEZERT J, et al. A successful applicat ion of DSmT in sonar grid map building and comparison with DST⁃based approach[ J]. International journal of innovative computing, information and control, 2007, 3 ( 3 ): 539-549. [7] LI X, DEZERT J, SMARANDACHE F, et al. Evidence support ing measure of similarity for reducing the complexity in informat ion fusion[J]. Information sciences, 2011, 181 (10): 1818-1835. [8]石朝侠,洪炳镕,周彤,等. 大规模环境下的拓扑地图创 建与导航[J]. 机器人, 2007, 29(5): 433-438. SHI Chaoxia, HONG Bingrong, ZHOU Tong, et al. Topological map building and navigation in large⁃scale environment ents[J]. Robot, 2007, 29(5): 433-438. [9]庄严,徐晓东,王伟.移动机器人几何-拓扑混合地图的 构建及自定位研究[ J]. 控制与决策, 2005, 20 ( 7): 815-818. ZHUANG Yan, XU Xiaodong, WANG Wei. Mobile robot geometric⁃topological map building and self⁃localization [ J]. Control and decision, 2005, 20(7): 815-818. [10]张秀龙,李新德,戴先中.基于组块分析的路径自然语言 语义角色标注方法[ J]. 东南大学学报: 自然科学版, 2012, 42(z1): 127-131. ZHANG Xiulong, LI Xingde, DAI Xianzhong. Semantic role labeling method for route natural language based on chunk parsing[J]. Journal of southeast university: natural science edition, 2012, 42(zl): 127-131. [11]李新德, 张秀龙, 戴先中.一种基于受限自然语言处理 的移动机器人视觉导航方法[ J]. 机器人, 2011, 33 (6): 742-749. LI Xingde, ZHANG Xiulong, DAI Xianzhong. A visual navigation method of mobile robot based on constrained natural language processing [ J]. Robot, 2011, 33 ( 6): 742-749. [12]李新德, 张秀龙.一种面向室内智能机器人导航的路径 自然语言处理方法[ J]. 自动化学报, 2012, 40 ( 2): 289-305. LI Xinde, ZHANG Xiulong. A route instruction method using natural language processing for indoor intelligent 第 4 期 张珂,等:基于非受限路径自然语言处理中的机器人导航 ·489·