正在加载图片...
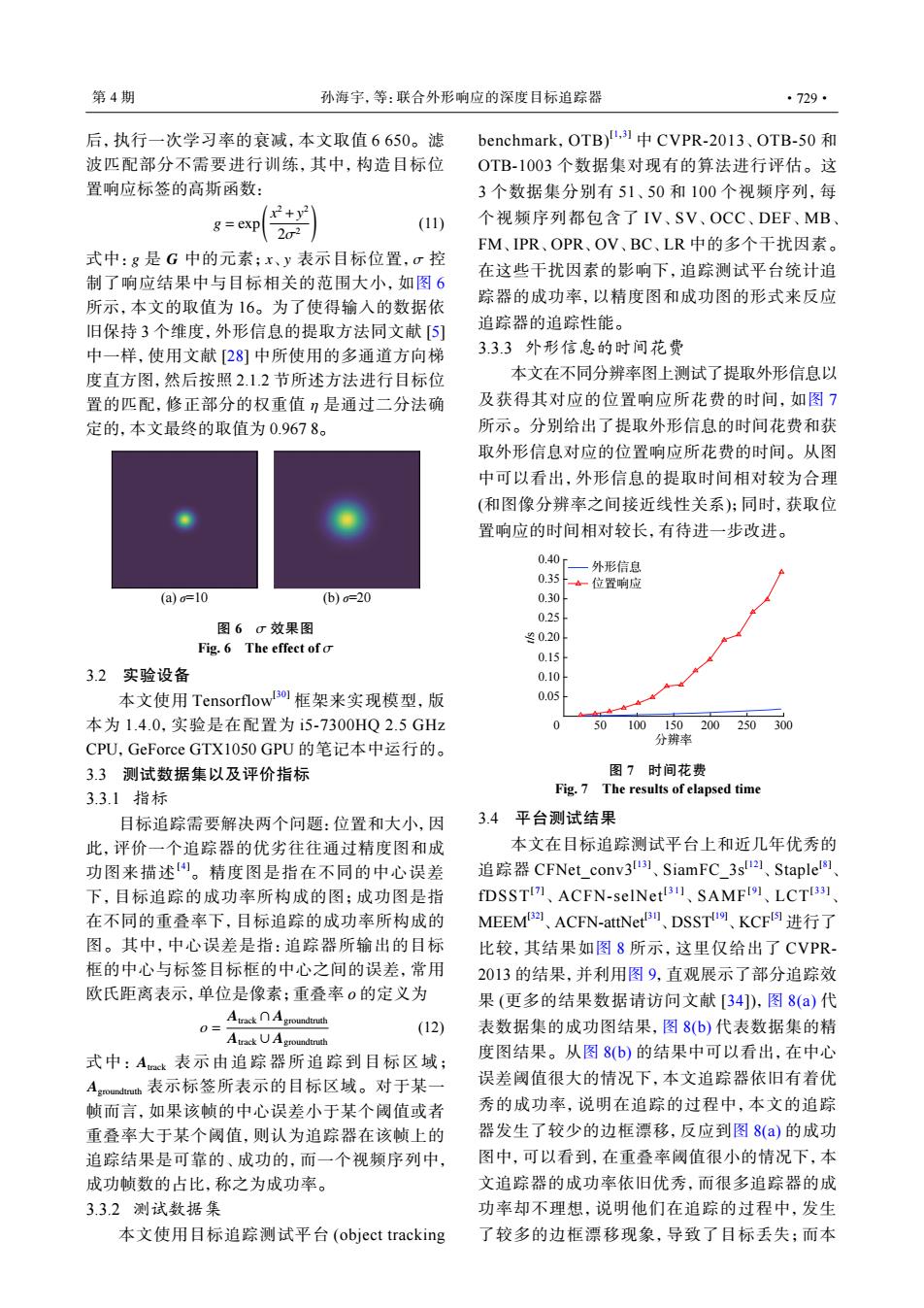
第4期 孙海宇,等:联合外形响应的深度目标追踪器 ·729· 后,执行一次学习率的衰减,本文取值6650。滤 benchmark,OTB),1中CVPR-2013、OTB-50和 波匹配部分不需要进行训练,其中,构造目标位 OTB-1003个数据集对现有的算法进行评估。这 置响应标签的高斯函数: 3个数据集分别有51、50和100个视频序列,每 x2+y2 g exp (11) 个视频序列都包含了IV、SV、OCC、DEF、MB、 22 FM、IPR、OPR、OV、BC、LR中的多个干扰因素。 式中:g是G中的元素;x、y表示目标位置,σ控 在这些干扰因素的影响下,追踪测试平台统计追 制了响应结果中与目标相关的范围大小,如图6 踪器的成功率,以精度图和成功图的形式来反应 所示,本文的取值为16。为了使得输入的数据依 旧保持3个维度,外形信息的提取方法同文献[5] 追踪器的追踪性能。 中一样,使用文献[28]中所使用的多通道方向梯 3.3.3外形信息的时间花费 度直方图,然后按照21.2节所述方法进行日标位 本文在不同分辨率图上测试了提取外形信息以 置的匹配,修正部分的权重值?是通过二分法确 及获得其对应的位置响应所花费的时间,如图7 定的,本文最终的取值为0.9678。 所示。分别给出了提取外形信息的时间花费和获 取外形信息对应的位置响应所花费的时间。从图 中可以看出,外形信息的提取时间相对较为合理 (和图像分辨率之间接近线性关系):同时,获取位 置响应的时间相对较长,有待进一步改进。 0.40r 外形信息 0.35 ·一位置响应 (a)o=10 (b)0=20 0.30 0.25 图6σ效果图 ≤0.20 Fig.6 The effect ofo 0.15 3.2实验设备 0.10 本文使用Tensorflowo框架来实现模型,版 0.05 本为1.4.0,实验是在配置为i5-7300HQ2.5GHz 0 50100150200250300 CPU,GeForceGTX1050GPU的笔记本中运行的。 分辨率 3.3测试数据集以及评价指标 图7时间花费 3.3.1指标 Fig.7 The results of elapsed time 目标追踪需要解决两个问题:位置和大小,因 3.4平台测试结果 此,评价一个追踪器的优劣往往通过精度图和成 本文在目标追踪测试平台上和近几年优秀的 功图来描述。精度图是指在不同的中心误差 追踪器CFNet conv3l)、SiamFC3s21、Staplels 下,目标追踪的成功率所构成的图;成功图是指 fDSSTI、ACFN-selNet!3I、SAMFIS例、LCTI3] 在不同的重叠率下,目标追踪的成功率所构成的 MEEM、ACFN-attNet、DSSTUS9、KCF进行了 图。其中,中心误差是指:追踪器所输出的目标 比较,其结果如图8所示,这里仅给出了CVPR- 框的中心与标签目标框的中心之间的误差,常用 2013的结果,并利用图9,直观展示了部分追踪效 欧氏距离表示,单位是像素;重叠率0的定义为 果(更多的结果数据请访问文献[34),图8(a)代 Atack∩Agroundtuth 0= (12) 表数据集的成功图结果,图8(b)代表数据集的精 Atack UAgroundtruth 式中:Ack表示由追踪器所追踪到目标区域; 度图结果。从图8(b)的结果中可以看出,在中心 Agroundinuth表示标签所表示的目标区域。对于某一 误差阈值很大的情况下,本文追踪器依旧有着优 帧而言,如果该帧的中心误差小于某个阈值或者 秀的成功率,说明在追踪的过程中,本文的追踪 重叠率大于某个阈值,则认为追踪器在该帧上的 器发生了较少的边框漂移,反应到图8(a)的成功 追踪结果是可靠的、成功的,而一个视频序列中, 图中,可以看到,在重叠率阈值很小的情况下,本 成功帧数的占比,称之为成功率。 文追踪器的成功率依旧优秀,而很多追踪器的成 3.3.2测试数据集 功率却不理想,说明他们在追踪的过程中,发生 本文使用目标追踪测试平台(object tracking 了较多的边框漂移现象,导致了目标丢失;而本后,执行一次学习率的衰减,本文取值 6 650。滤 波匹配部分不需要进行训练,其中,构造目标位 置响应标签的高斯函数: g = exp( x 2 +y 2 2σ2 ) (11) g G x y σ η 式中: 是 中的元素; 、 表示目标位置, 控 制了响应结果中与目标相关的范围大小,如图 6 所示,本文的取值为 16。为了使得输入的数据依 旧保持 3 个维度,外形信息的提取方法同文献 [5] 中一样,使用文献 [28] 中所使用的多通道方向梯 度直方图,然后按照 2.1.2 节所述方法进行目标位 置的匹配,修正部分的权重值 是通过二分法确 定的,本文最终的取值为 0.967 8。 (a) σ=10 (b) σ=20 图 6 σ 效果图 Fig. 6 The effect of σ 3.2 实验设备 本文使用 Tensorflow[30] 框架来实现模型,版 本为 1.4.0,实验是在配置为 i5-7300HQ 2.5 GHz CPU,GeForce GTX1050 GPU 的笔记本中运行的。 3.3 测试数据集以及评价指标 3.3.1 指标 目标追踪需要解决两个问题:位置和大小,因 此,评价一个追踪器的优劣往往通过精度图和成 功图来描述[4]。精度图是指在不同的中心误差 下,目标追踪的成功率所构成的图;成功图是指 在不同的重叠率下,目标追踪的成功率所构成的 图。其中,中心误差是指:追踪器所输出的目标 框的中心与标签目标框的中心之间的误差,常用 欧氏距离表示,单位是像素;重叠率 o 的定义为 o = Atrack ∩ Agroundtruth Atrack ∪ Agroundtruth (12) Atrack Agroundtruth 式中: 表示由追踪器所追踪到目标区域; 表示标签所表示的目标区域。对于某一 帧而言,如果该帧的中心误差小于某个阈值或者 重叠率大于某个阈值,则认为追踪器在该帧上的 追踪结果是可靠的、成功的,而一个视频序列中, 成功帧数的占比,称之为成功率。 3.3.2 测试数据集 本文使用目标追踪测试平台 (object tracking benchmark,OTB)[1,3] 中 CVPR-2013、OTB-50 和 OTB-1003 个数据集对现有的算法进行评估。这 3 个数据集分别有 51、50 和 100 个视频序列,每 个视频序列都包含了 IV、SV、OCC、DEF、MB、 FM、IPR、OPR、OV、BC、LR 中的多个干扰因素。 在这些干扰因素的影响下,追踪测试平台统计追 踪器的成功率,以精度图和成功图的形式来反应 追踪器的追踪性能。 3.3.3 外形信息的时间花费 本文在不同分辨率图上测试了提取外形信息以 及获得其对应的位置响应所花费的时间,如图 7 所示。分别给出了提取外形信息的时间花费和获 取外形信息对应的位置响应所花费的时间。从图 中可以看出,外形信息的提取时间相对较为合理 (和图像分辨率之间接近线性关系);同时,获取位 置响应的时间相对较长,有待进一步改进。 0 50 100 150 200 250 300 分辨率 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 t/s 外形信息 位置响应 图 7 时间花费 Fig. 7 The results of elapsed time 3.4 平台测试结果 本文在目标追踪测试平台上和近几年优秀的 追踪器 CFNet_conv3[13] 、SiamFC_3s[12] 、Staple[8] 、 fDSST[ 7 ] 、ACFN-selNet[ 3 1 ] 、SAMF[ 9 ] 、LCT[ 3 3 ] 、 MEEM[32] 、ACFN-attNet[31] 、DSST[19] 、KCF[5] 进行了 比较,其结果如图 8 所示,这里仅给出了 CVPR- 2013 的结果,并利用图 9,直观展示了部分追踪效 果 (更多的结果数据请访问文献 [34]),图 8(a) 代 表数据集的成功图结果,图 8(b) 代表数据集的精 度图结果。从图 8(b) 的结果中可以看出,在中心 误差阈值很大的情况下,本文追踪器依旧有着优 秀的成功率,说明在追踪的过程中,本文的追踪 器发生了较少的边框漂移,反应到图 8(a) 的成功 图中,可以看到,在重叠率阈值很小的情况下,本 文追踪器的成功率依旧优秀,而很多追踪器的成 功率却不理想,说明他们在追踪的过程中,发生 了较多的边框漂移现象,导致了目标丢失;而本 第 4 期 孙海宇,等:联合外形响应的深度目标追踪器 ·729·