正在加载图片...
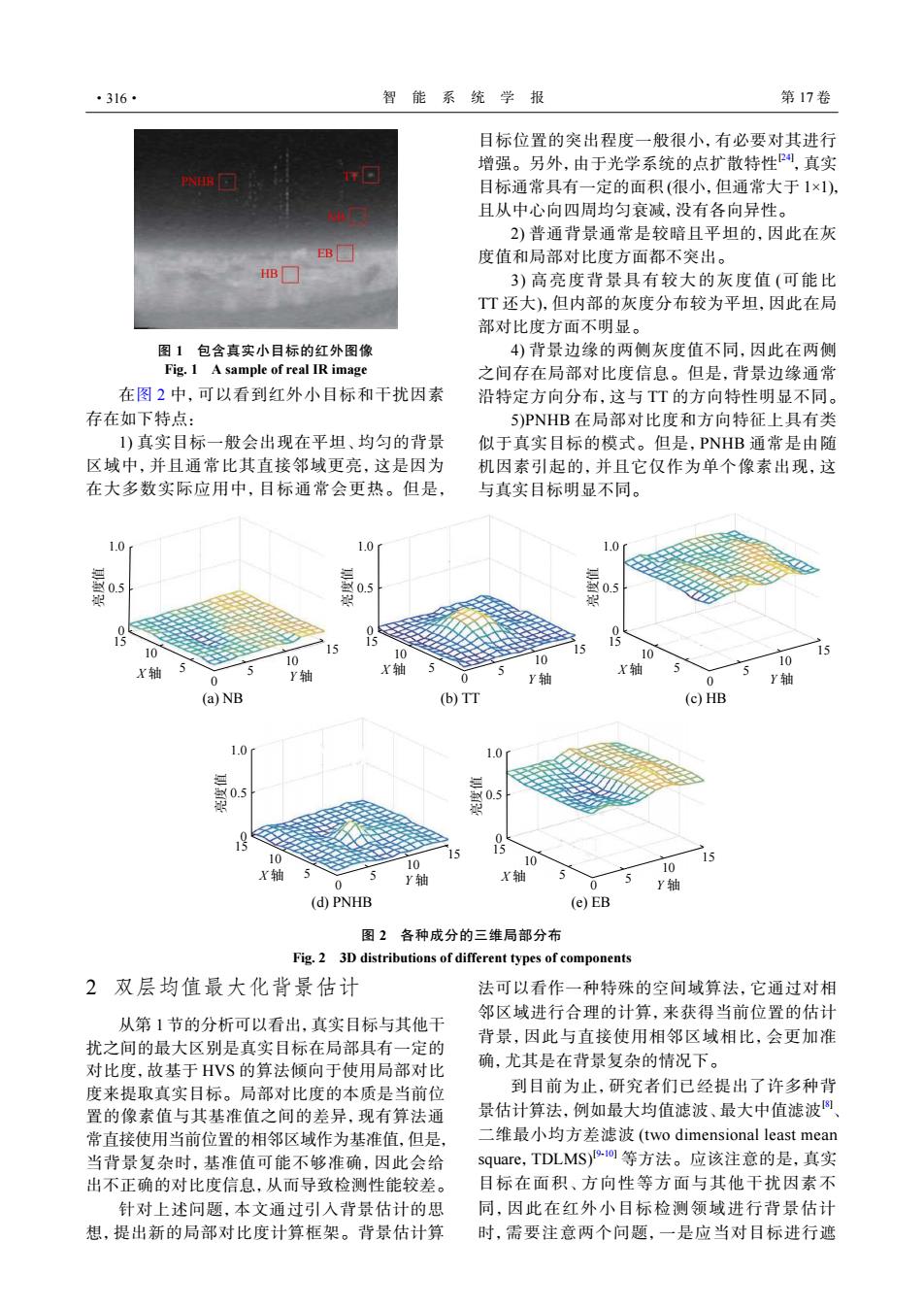
·316· 智能系统学报 第17卷 目标位置的突出程度一般很小,有必要对其进行 增强。另外,由于光学系统的点扩散特性,真实 B回 目标通常具有一定的面积(很小,但通常大于1×1), 且从中心向四周均匀衰减,没有各向异性。 2)普通背景通常是较暗且平坦的,因此在灰 EB 度值和局部对比度方面都不突出。 HB 3)高亮度背景具有较大的灰度值(可能比 TT还大),但内部的灰度分布较为平坦,因此在局 部对比度方面不明显。 图1包含真实小目标的红外图像 4)背景边缘的两侧灰度值不同,因此在两侧 Fig.1 A sample of real IR image 之间存在局部对比度信息。但是,背景边缘通常 在图2中,可以看到红外小目标和干扰因素 沿特定方向分布,这与TT的方向特性明显不同。 存在如下特点: 5)PNHB在局部对比度和方向特征上具有类 1)真实目标一般会出现在平坦、均匀的背景 似于真实目标的模式。但是,PNHB通常是由随 区域中,并且通常比其直接邻域更亮,这是因为 机因素引起的,并且它仅作为单个像素出现,这 在大多数实际应用中,目标通常会更热。但是, 与真实目标明显不同。 1.0 1.0 1.0 as 阳 15 10 0 15 10 10 10 10 X轴 5 Y轴 X轴 5 X轴 0 Y轴 0 Y轴 (a)NB (b)TT (c)HB 1.0 1.0 0.5 5 10 15 10 10 15 10 X轴 5 5 Y轴 X轴 0 5 0 Y轴 (d)PNHB (e)EB 图2各种成分的三维局部分布 Fig.2 3D distributions of different types of components 2双层均值最大化背景估计 法可以看作一种特殊的空间域算法,它通过对相 邻区域进行合理的计算,来获得当前位置的估计 从第1节的分析可以看出,真实目标与其他干 背景,因此与直接使用相邻区域相比,会更加准 扰之间的最大区别是真实目标在局部具有一定的 对比度,故基于HVS的算法倾向于使用局部对比 确,尤其是在背景复杂的情况下。 度来提取真实目标。局部对比度的本质是当前位 到目前为止,研究者们已经提出了许多种背 置的像素值与其基准值之间的差异,现有算法通 景估计算法,例如最大均值滤波、最大中值滤波⑧ 常直接使用当前位置的相邻区域作为基准值,但是, 二维最小均方差滤波(two dimensional least mean 当背景复杂时,基准值可能不够准确,因此会给 square,TDLMS)-1o等方法。应该注意的是,真实 出不正确的对比度信息,从而导致检测性能较差。 目标在面积、方向性等方面与其他干扰因素不 针对上述问题,本文通过引入背景估计的思 同,因此在红外小目标检测领域进行背景估计 想,提出新的局部对比度计算框架。背景估计算 时,需要注意两个问题,一是应当对目标进行遮PNHB TT NB EB HB 图 1 包含真实小目标的红外图像 Fig. 1 A sample of real IR image 在图 2 中,可以看到红外小目标和干扰因素 存在如下特点: 1) 真实目标一般会出现在平坦、均匀的背景 区域中,并且通常比其直接邻域更亮,这是因为 在大多数实际应用中,目标通常会更热。但是, 目标位置的突出程度一般很小,有必要对其进行 增强。另外,由于光学系统的点扩散特性[24] ,真实 目标通常具有一定的面积 (很小,但通常大于 1×1), 且从中心向四周均匀衰减,没有各向异性。 2) 普通背景通常是较暗且平坦的,因此在灰 度值和局部对比度方面都不突出。 3) 高亮度背景具有较大的灰度值 (可能比 TT 还大),但内部的灰度分布较为平坦,因此在局 部对比度方面不明显。 4) 背景边缘的两侧灰度值不同,因此在两侧 之间存在局部对比度信息。但是,背景边缘通常 沿特定方向分布,这与 TT 的方向特性明显不同。 5)PNHB 在局部对比度和方向特征上具有类 似于真实目标的模式。但是,PNHB 通常是由随 机因素引起的,并且它仅作为单个像素出现,这 与真实目标明显不同。 5 1.0 0.5 0 0 (a) NB (b) TT (c) HB (d) PNHB (e) EB 0 0 0 0 15 10 5 10 X 轴 Y 轴 15 5 1.0 0.5 0 15 10 5 10 Y 轴 X 轴 15 5 1.0 0.5 0 15 10 5 10 Y 轴 X 轴 15 5 1.0 0.5 0 15 10 5 10 Y 轴 X 轴 15 5 1.0 0.5 0 15 10 5 10 X 轴 Y 轴 15 亮度值 亮度值 亮度值 亮度值 亮度值 图 2 各种成分的三维局部分布 Fig. 2 3D distributions of different types of components 2 双层均值最大化背景估计 从第 1 节的分析可以看出,真实目标与其他干 扰之间的最大区别是真实目标在局部具有一定的 对比度,故基于 HVS 的算法倾向于使用局部对比 度来提取真实目标。局部对比度的本质是当前位 置的像素值与其基准值之间的差异,现有算法通 常直接使用当前位置的相邻区域作为基准值,但是, 当背景复杂时,基准值可能不够准确,因此会给 出不正确的对比度信息,从而导致检测性能较差。 针对上述问题,本文通过引入背景估计的思 想,提出新的局部对比度计算框架。背景估计算 法可以看作一种特殊的空间域算法,它通过对相 邻区域进行合理的计算,来获得当前位置的估计 背景,因此与直接使用相邻区域相比,会更加准 确,尤其是在背景复杂的情况下。 到目前为止,研究者们已经提出了许多种背 景估计算法,例如最大均值滤波、最大中值滤波[8] 、 二维最小均方差滤波 (two dimensional least mean square,TDLMS)[9-10] 等方法。应该注意的是,真实 目标在面积、方向性等方面与其他干扰因素不 同,因此在红外小目标检测领域进行背景估计 时,需要注意两个问题,一是应当对目标进行遮 ·316· 智 能 系 统 学 报 第 17 卷