正在加载图片...
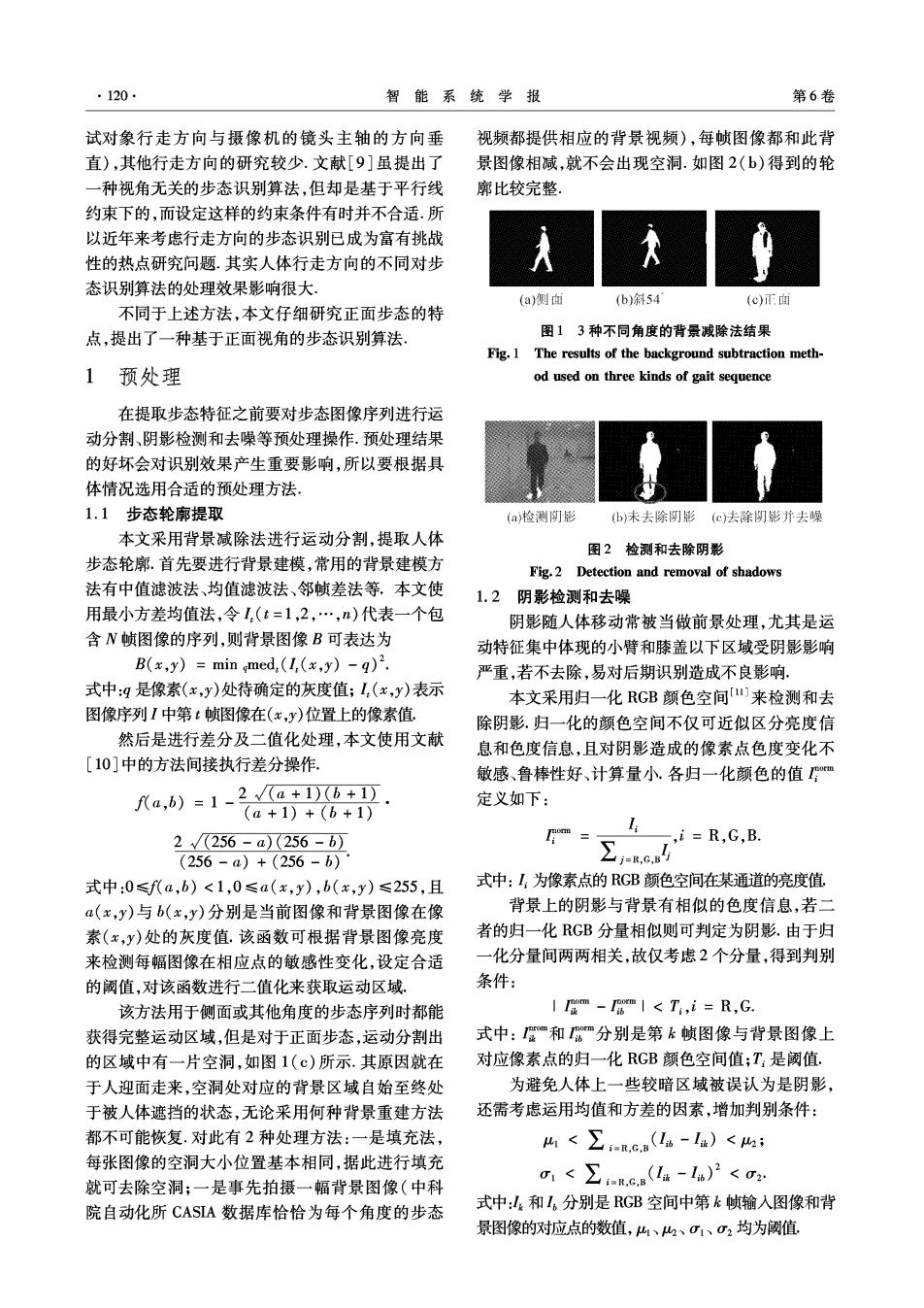
·120 智能系统学报 第6卷 试对象行走方向与摄像机的镜头主轴的方向垂 视频都提供相应的背景视频),每帧图像都和此背 直),其他行走方向的研究较少.文献[9]虽提出了 景图像相减,就不会出现空洞.如图2(b)得到的轮 一种视角无关的步态识别算法,但却是基于平行线 廓比较完整. 约束下的,而设定这样的约束条件有时并不合适.所 以近年来考虑行走方向的步态识别已成为富有挑战 性的热点研究问题.其实人体行走方向的不同对步 态识别算法的处理效果影响很大. (a)侧面 (b)斜54 (c)f面 不同于上述方法,本文仔细研究正面步态的特 点,提出了一种基于正面视角的步态识别算法。 图13种不同角度的背景减除法结果 Fig.1 The results of the background subtraction meth- 1预处理 od used on three kinds of gait sequence 在提取步态特征之前要对步态图像序列进行运 动分割、阴影检测和去噪等预处理操作.预处理结果 的好坏会对识别效果产生重要影响,所以要根据具 体情况选用合适的预处理方法, 1.1步态轮廓提取 (a检测阴影 凸未去除砌影(c)去涂彻影并去噪 本文采用背景减除法进行运动分割,提取人体 图2检测和去除阴影 步态轮廓.首先要进行背景建模,常用的背景建模方 Fig.2 Detection and removal of shadows 法有中值滤波法、均值滤波法、邻帧差法等。本文使 1.2阴影检测和去噪 用最小方差均值法,令1,(t=1,2,…,n)代表一个包 阴影随人体移动常被当做前景处理,尤其是运 含N帧图像的序列,则背景图像B可表达为 动特征集中体现的小臂和膝盖以下区域受阴影影响 B(x,y)=min med,,(L,(x,y)-q)2. 严重,若不去除,易对后期识别造成不良影响。 式中:q是像素(x,y)处待确定的灰度值;,(x,y)表示 本文采用归一化RGB颜色空间来检测和去 图像序列I中第t帧图像在(x,y)位置上的像素值 除阴影,归一化的颜色空间不仅可近似区分亮度信 然后是进行差分及二值化处理,本文使用文献 息和色度信息,且对阴影造成的像素点色度变化不 [10]中的方法间接执行差分操作, 敏感、鲁棒性好、计算量小.各归一化颜色的值 fa,b)=1-2a+1)(6+1) 定义如下: (a+1)+(b+1) 2/(256-a)(256-b) -,i=R,G,B. (256-a)+(256-b)1 式中:0≤fa,b)<1,0≤a(x,y),b(x,y)≤255,且 式中:I为像素点的RGB颜色空间在某通道的亮度值, a(x,y)与b(x,y)分别是当前图像和背景图像在像 背景上的阴影与背景有相似的色度信息,若二 素(x,y)处的灰度值.该函数可根据背景图像亮度 者的归一化RGB分量相似则可判定为阴影.由于归 来检测每幅图像在相应点的敏感性变化,设定合适 一化分量间两两相关,故仅考虑2个分量,得到判别 的阈值,对该函数进行二值化来获取运动区域。 条件: 该方法用于侧面或其他角度的步态序列时都能 ITom Tom I<Ti,i=R,G. 获得完整运动区域,但是对于正面步态,运动分割出 式中:和分别是第k帧图像与背景图像上 的区域中有一片空洞,如图1(c)所示.其原因就在 对应像素点的归一化RGB颜色空间值;T:是阈值. 于人迎面走来,空洞处对应的背景区域自始至终处 为避免人体上一些较暗区域被误认为是阴影, 于被人体遮挡的状态,无论采用何种背景重建方法 还需考虑运用均值和方差的因素,增加判别条件: 都不可能恢复.对此有2种处理方法:一是填充法, 山<∑R6B(L-la)<h: 每张图像的空洞大小位置基本相同,据此进行填充 就可去除空洞;一是事先拍摄一幅背景图像(中科 01<∑6B(1a-w)2<o2 院自动化所CASIA数据库恰恰为每个角度的步态 式中:山。和I。分别是RGB空间中第k帧输入图像和背 景图像的对应点的数值,山1、山2、O1、σ2均为阈值