正在加载图片...
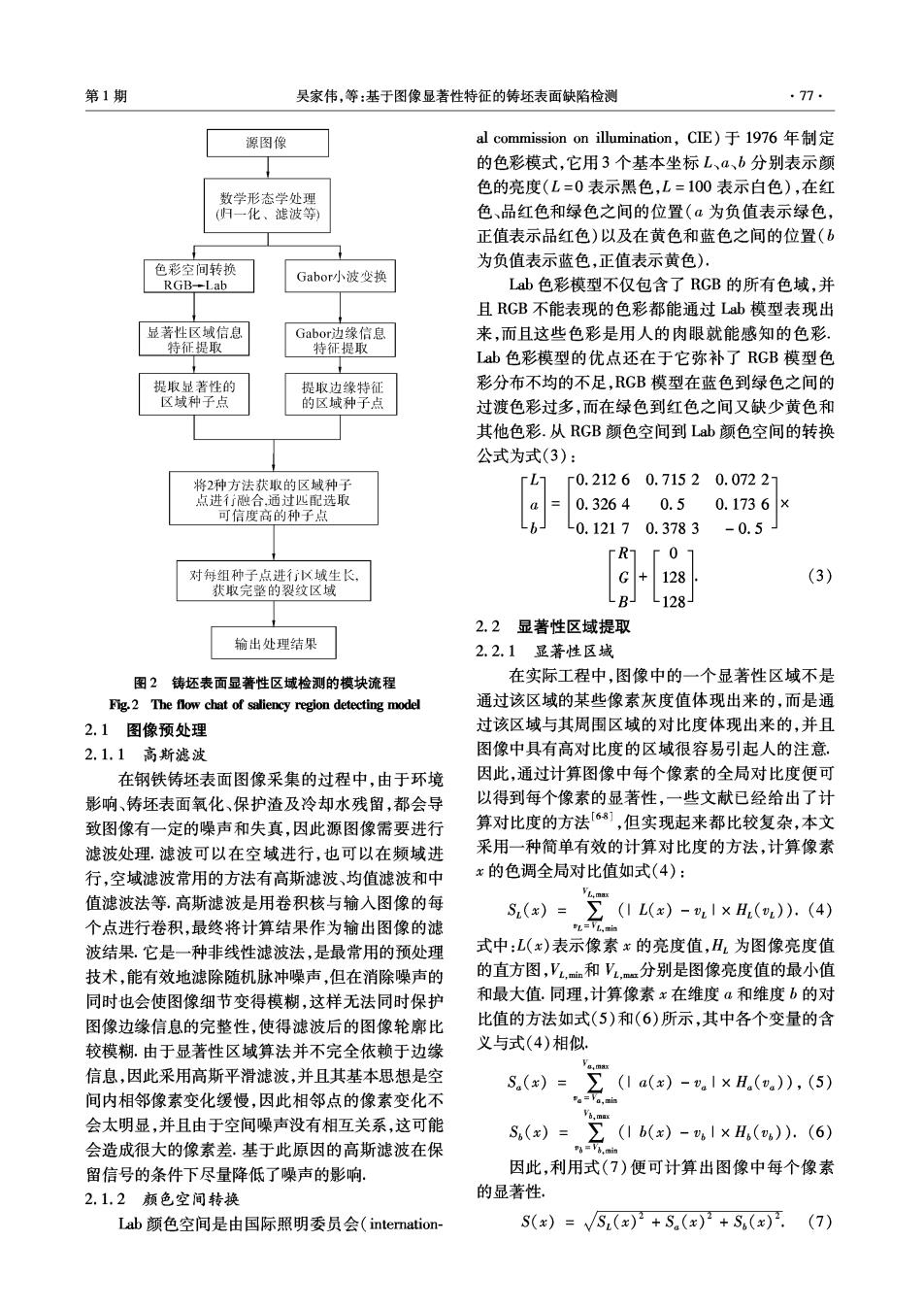
第1期 吴家伟,等:基于图像显著性特征的俦坯表面缺陷检测 ·77 源图像 al commission on illumination,CE)于1976年制定 的色彩模式,它用3个基本坐标L、a、b分别表示颜 色的亮度(L=0表示黑色,L=100表示白色),在红 数学形态学处理 (归一化、滤波等) 色、品红色和绿色之间的位置(a为负值表示绿色, 正值表示品红色)以及在黄色和蓝色之间的位置(b 色彩空间转换 为负值表示蓝色,正值表示黄色). Gabor/小波变换 RGB--Lab Lab色彩模型不仅包含了RGB的所有色域,并 且RGB不能表现的色彩都能通过Lab模型表现出 显著性区域信息 Gabori边缘信息 来,而且这些色彩是用人的肉眼就能感知的色彩 特征提取 特征提取 Lb色彩模型的优点还在于它弥补了RGB模型色 提取显著性的 提取边缘特征 彩分布不均的不足,RGB模型在蓝色到绿色之间的 区域种子点 的区域种子点 过渡色彩过多,而在绿色到红色之间又缺少黄色和 其他色彩.从RGB颜色空间到Lab颜色空间的转换 公式为式(3): 将2种方法获取的区域种子 r0.21260.71520.0722 点进彳了融合,通过匹配选取 0.3264 0.5 0.1736 可信度高的种子点 -0.12170.3783 -0.5J 「R 对每组种子点进行以域生长, 128 (3) 获取完整的裂纹区域 128 2.2显著性区域提取 输出处理结果 2.2.1显著性区域 图2铸还表面显著性区域检测的模块流程 在实际工程中,图像中的一个显著性区域不是 Fig.2 The flow chat of saliency region detecting model 通过该区域的某些像素灰度值体现出来的,而是通 2.1图像预处理 过该区域与其周围区域的对比度体现出来的,并且 2.1.1高斯滤波 图像中具有高对比度的区域很容易引起人的注意 在钢铁铸坯表面图像采集的过程中,由于环境 因此,通过计算图像中每个像素的全局对比度便可 影响、铸坯表面氧化、保护渣及冷却水残留,都会导 以得到每个像素的显著性,一些文献已经给出了计 致图像有一定的噪声和失真,因此源图像需要进行 算对比度的方法[6$],但实现起来都比较复杂,本文 滤波处理,滤波可以在空域进行,也可以在频域进 采用一种简单有效的计算对比度的方法,计算像素 行,空域滤波常用的方法有高斯滤波、均值滤波和中 x的色调全局对比值如式(4): 值滤波法等,高斯滤波是用卷积核与输入图像的每 8(): (1L(x)-I×H().(4)》 个点进行卷积,最终将计算结果作为输出图像的滤 L=VLmin 波结果.它是一种非线性滤波法,是最常用的预处理 式中:L(x)表示像素x的亮度值,H为图像亮度值 技术,能有效地滤除随机脉冲噪声,但在消除噪声的 的直方图,V,和V,m=分别是图像亮度值的最小值 同时也会使图像细节变得模糊,这样无法同时保护 和最大值.同理,计算像素x在维度a和维度b的对 图像边缘信息的完整性,使得滤波后的图像轮廓比 比值的方法如式(5)和(6)所示,其中各个变量的含 较模糊.由于显著性区域算法并不完全依赖于边缘 义与式(4)相似. 信息,因此采用高斯平滑滤波,并且其基本思想是空 S.(x)= ,(1a(x)-v.I×H.(a),(5) 间内相邻像素变化缓慢,因此相邻点的像素变化不 a=Yo,min 会太明显,并且由于空间噪声没有相互关系,这可能 S(x)=】 ,(Ib(x)-v61×H(6)).(6) 会造成很大的像素差.基于此原因的高斯滤波在保 鸭=%,min 留信号的条件下尽量降低了噪声的影响. 因此,利用式(7)便可计算出图像中每个像素 2.1.2颜色空间转换 的显著性。 Lab颜色空间是由国际照明委员会(internation- S(x)=√S(x)+S.(x)2+S(x).(7)