正在加载图片...
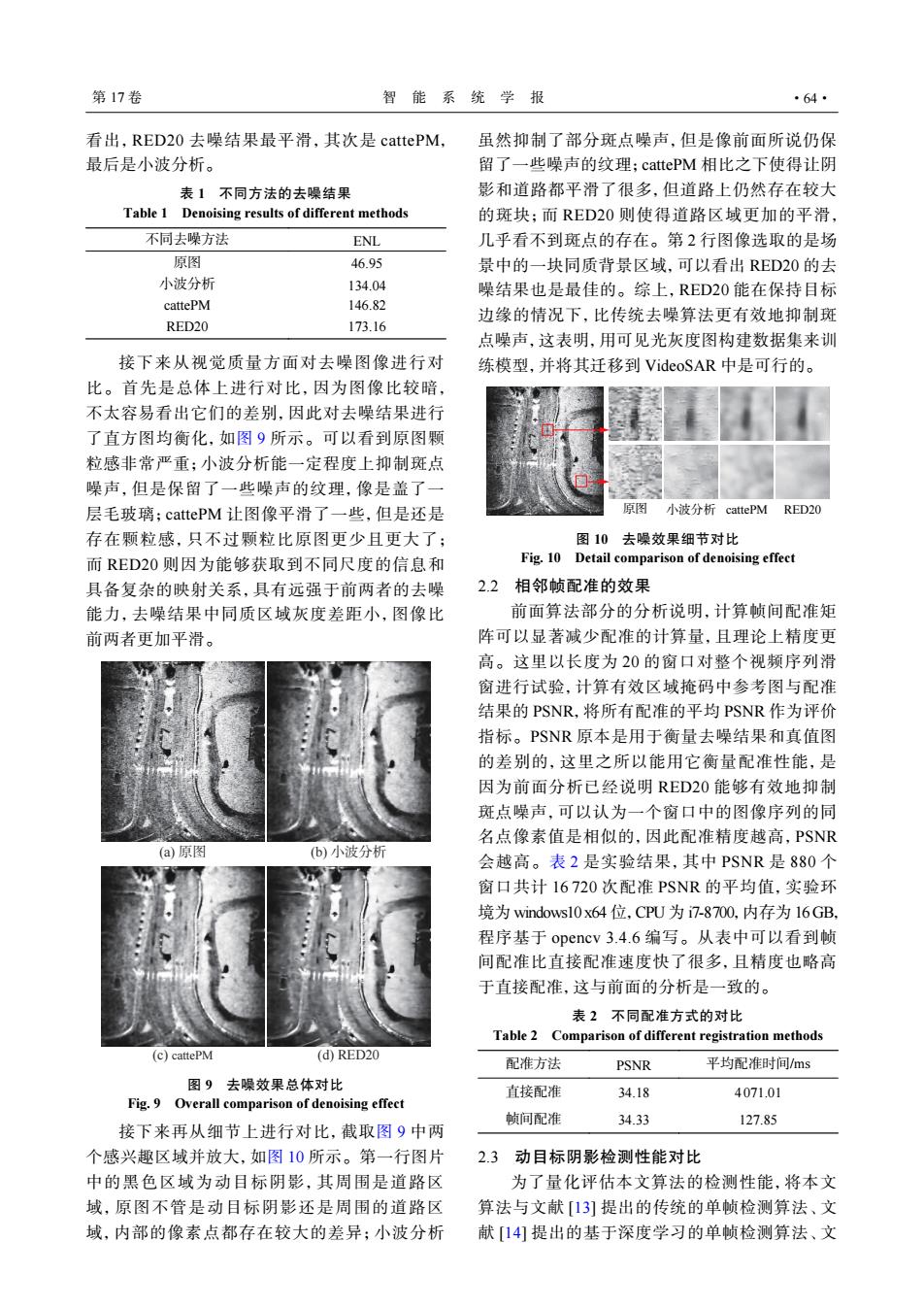
第17卷 智能系统学报 ·64· 看出,RED20去噪结果最平滑,其次是cattePM, 虽然抑制了部分斑点噪声,但是像前面所说仍保 最后是小波分析。 留了一些噪声的纹理;cattePM相比之下使得让阴 表1不同方法的去噪结果 影和道路都平滑了很多,但道路上仍然存在较大 Table 1 Denoising results of different methods 的斑块;而RED20则使得道路区域更加的平滑, 不同去噪方法 ENL 几乎看不到斑点的存在。第2行图像选取的是场 原图 46.95 景中的一块同质背景区域,可以看出RED20的去 小波分析 134.04 噪结果也是最佳的。综上,RED20能在保持目标 cattePM 146.82 边缘的情况下,比传统去噪算法更有效地抑制斑 RED20 173.16 点噪声,这表明,用可见光灰度图构建数据集来训 接下来从视觉质量方面对去噪图像进行对 练模型,并将其迁移到VideoSAR中是可行的。 比。首先是总体上进行对比,因为图像比较暗, 不太容易看出它们的差别,因此对去噪结果进行 了直方图均衡化,如图9所示。可以看到原图颗 粒感非常严重;小波分析能一定程度上抑制斑点 噪声,但是保留了一些噪声的纹理,像是盖了 层毛玻璃;cattePM让图像平滑了一些,但是还是 原图小波分析cattePM RED20 存在颗粒感,只不过颗粒比原图更少且更大了; 图10去噪效果细节对比 而RED20则因为能够获取到不同尺度的信息和 Fig.10 Detail comparison of denoising effect 具备复杂的映射关系,具有远强于前两者的去噪 2.2相邻帧配准的效果 能力,去噪结果中同质区域灰度差距小,图像比 前面算法部分的分析说明,计算帧间配准矩 前两者更加平滑。 阵可以显著减少配准的计算量,且理论上精度更 高。这里以长度为20的窗口对整个视频序列滑 窗进行试验,计算有效区域掩码中参考图与配准 结果的PSNR,将所有配准的平均PSNR作为评价 指标。PSNR原本是用于衡量去噪结果和真值图 的差别的,这里之所以能用它衡量配准性能,是 因为前面分析已经说明RED20能够有效地抑制 斑点噪声,可以认为一个窗口中的图像序列的同 名点像素值是相似的,因此配准精度越高,PSNR (a)原图 (b)小波分析 会越高。表2是实验结果,其中PSNR是880个 窗口共计16720次配准PSNR的平均值,实验环 境为windows1(0x64位,CPU为i7-8700,内存为16GB 程序基于opencv3.4.6编写。从表中可以看到帧 间配准比直接配准速度快了很多,且精度也略高 于直接配准,这与前面的分析是一致的。 表2不同配准方式的对比 Table 2 Comparison of different registration methods (c)cattePM (d)RED20 配准方法 PSNR 平均配准时间/ms 图9去噪效果总体对比 直接配准 Fig.9 Overall comparison of denoising effect 34.18 4071.01 帧间配准 34.33 127.85 接下来再从细节上进行对比,截取图9中两 个感兴趣区域并放大,如图10所示。第一行图片 2.3动目标阴影检测性能对比 中的黑色区域为动目标阴影,其周围是道路区 为了量化评估本文算法的检测性能,将本文 域,原图不管是动目标阴影还是周围的道路区 算法与文献[13]提出的传统的单帧检测算法、文 域,内部的像素点都存在较大的差异;小波分析 献[14]提出的基于深度学习的单帧检测算法、文看出,RED20 去噪结果最平滑,其次是 cattePM, 最后是小波分析。 表 1 不同方法的去噪结果 Table 1 Denoising results of different methods 不同去噪方法 ENL 原图 46.95 小波分析 134.04 cattePM 146.82 RED20 173.16 接下来从视觉质量方面对去噪图像进行对 比。首先是总体上进行对比,因为图像比较暗, 不太容易看出它们的差别,因此对去噪结果进行 了直方图均衡化,如图 9 所示。可以看到原图颗 粒感非常严重;小波分析能一定程度上抑制斑点 噪声,但是保留了一些噪声的纹理,像是盖了一 层毛玻璃;cattePM 让图像平滑了一些,但是还是 存在颗粒感,只不过颗粒比原图更少且更大了; 而 RED20 则因为能够获取到不同尺度的信息和 具备复杂的映射关系,具有远强于前两者的去噪 能力,去噪结果中同质区域灰度差距小,图像比 前两者更加平滑。 (a) 原图 (c) cattePM (b) 小波分析 (d) RED20 图 9 去噪效果总体对比 Fig. 9 Overall comparison of denoising effect 接下来再从细节上进行对比,截取图 9 中两 个感兴趣区域并放大,如图 10 所示。第一行图片 中的黑色区域为动目标阴影,其周围是道路区 域,原图不管是动目标阴影还是周围的道路区 域,内部的像素点都存在较大的差异;小波分析 虽然抑制了部分斑点噪声,但是像前面所说仍保 留了一些噪声的纹理;cattePM 相比之下使得让阴 影和道路都平滑了很多,但道路上仍然存在较大 的斑块;而 RED20 则使得道路区域更加的平滑, 几乎看不到斑点的存在。第 2 行图像选取的是场 景中的一块同质背景区域,可以看出 RED20 的去 噪结果也是最佳的。综上,RED20 能在保持目标 边缘的情况下,比传统去噪算法更有效地抑制斑 点噪声,这表明,用可见光灰度图构建数据集来训 练模型,并将其迁移到 VideoSAR 中是可行的。 原图 小波分析 cattePM RED20 图 10 去噪效果细节对比 Fig. 10 Detail comparison of denoising effect 2.2 相邻帧配准的效果 前面算法部分的分析说明,计算帧间配准矩 阵可以显著减少配准的计算量,且理论上精度更 高。这里以长度为 20 的窗口对整个视频序列滑 窗进行试验,计算有效区域掩码中参考图与配准 结果的 PSNR,将所有配准的平均 PSNR 作为评价 指标。PSNR 原本是用于衡量去噪结果和真值图 的差别的,这里之所以能用它衡量配准性能,是 因为前面分析已经说明 RED20 能够有效地抑制 斑点噪声,可以认为一个窗口中的图像序列的同 名点像素值是相似的,因此配准精度越高,PSNR 会越高。表 2 是实验结果,其中 PSNR 是 880 个 窗口共计 16 720 次配准 PSNR 的平均值,实验环 境为 windows10 x64 位,CPU 为 i7-8700,内存为 16 GB, 程序基于 opencv 3.4.6 编写。从表中可以看到帧 间配准比直接配准速度快了很多,且精度也略高 于直接配准,这与前面的分析是一致的。 表 2 不同配准方式的对比 Table 2 Comparison of different registration methods 配准方法 PSNR 平均配准时间/ms 直接配准 34.18 4071.01 帧间配准 34.33 127.85 2.3 动目标阴影检测性能对比 为了量化评估本文算法的检测性能,将本文 算法与文献 [13] 提出的传统的单帧检测算法、文 献 [14] 提出的基于深度学习的单帧检测算法、文 第 17 卷 智 能 系 统 学 报 ·64·