正在加载图片...
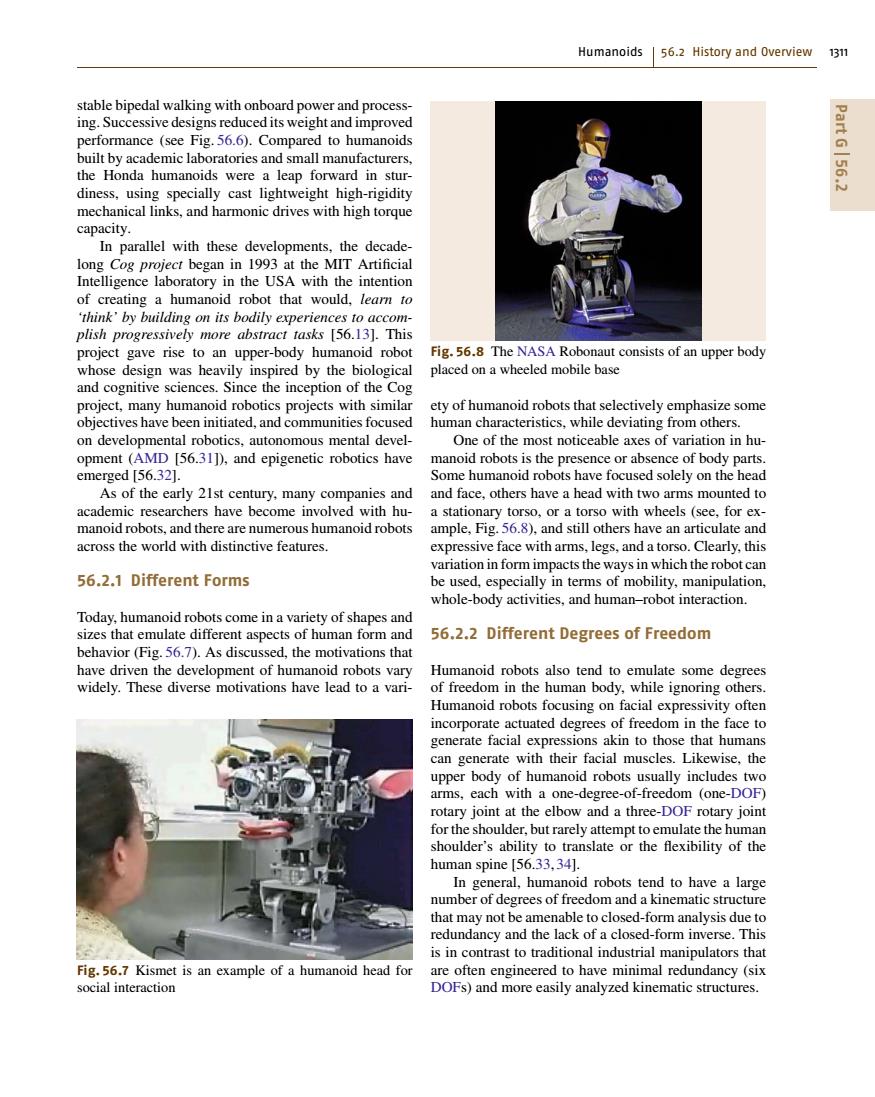
Humanoids 56.2 History and Overview 1311 stable bipedal walking with onboard power and process- ing.Successive designs reduced its weight and improved performance (see Fig.56.6).Compared to humanoids built by academic laboratories and small manufacturers, the Honda humanoids were a leap forward in stur- Part G56.2 diness,using specially cast lightweight high-rigidity mechanical links,and harmonic drives with high torque capacity. In parallel with these developments,the decade- long Cog project began in 1993 at the MIT Artificial Intelligence laboratory in the USA with the intention of creating a humanoid robot that would,learn to think'by building on its bodily experiences to accom- plish progressively more abstract tasks [56.13].This project gave rise to an upper-body humanoid robot Fig.56.8 The NASA Robonaut consists of an upper body whose design was heavily inspired by the biological placed on a wheeled mobile base and cognitive sciences.Since the inception of the Cog project,many humanoid robotics projects with similar ety of humanoid robots that selectively emphasize some objectives have been initiated,and communities focused human characteristics,while deviating from others on developmental robotics,autonomous mental devel- One of the most noticeable axes of variation in hu- opment (AMD [56.31]),and epigenetic robotics have manoid robots is the presence or absence of body parts. emerged [56.32]. Some humanoid robots have focused solely on the head As of the early 21st century,many companies andand face,others have a head with two arms mounted to academic researchers have become involved with hu-a stationary torso,or a torso with wheels(see,for ex- manoid robots,and there are numerous humanoid robots ample,Fig.56.8),and still others have an articulate and across the world with distinctive features. expressive face with arms,legs,and a torso.Clearly,this variation in form impacts the ways in which the robot can 56.2.1 Different Forms be used,especially in terms of mobility,manipulation, whole-body activities.and human-robot interaction. Today,humanoid robots come in a variety of shapes and sizes that emulate different aspects of human form and 56.2.2 Different Degrees of Freedom behavior(Fig.56.7).As discussed,the motivations that have driven the development of humanoid robots vary Humanoid robots also tend to emulate some degrees widely.These diverse motivations have lead to a vari- of freedom in the human body,while ignoring others. Humanoid robots focusing on facial expressivity often incorporate actuated degrees of freedom in the face to generate facial expressions akin to those that humans can generate with their facial muscles.Likewise,the upper body of humanoid robots usually includes two arms,each with a one-degree-of-freedom (one-DOF) rotary joint at the elbow and a three-DOF rotary joint for the shoulder,but rarely attempt to emulate the human shoulder's ability to translate or the flexibility of the human spine [56.33,341. In general,humanoid robots tend to have a large number of degrees of freedom and a kinematic structure that may not be amenable to closed-form analysis due to redundancy and the lack of a closed-form inverse.This is in contrast to traditional industrial manipulators that Fig.56.7 Kismet is an example of a humanoid head for are often engineered to have minimal redundancy (six social interaction DOFs)and more easily analyzed kinematic structures.Humanoids 56.2 History and Overview 1311 stable bipedal walking with onboard power and processing. Successive designs reduced its weight and improved performance (see Fig. 56.6). Compared to humanoids built by academic laboratories and small manufacturers, the Honda humanoids were a leap forward in sturdiness, using specially cast lightweight high-rigidity mechanical links, and harmonic drives with high torque capacity. In parallel with these developments, the decadelong Cog project began in 1993 at the MIT Artificial Intelligence laboratory in the USA with the intention of creating a humanoid robot that would, learn to ‘think’ by building on its bodily experiences to accomplish progressively more abstract tasks [56.13]. This project gave rise to an upper-body humanoid robot whose design was heavily inspired by the biological and cognitive sciences. Since the inception of the Cog project, many humanoid robotics projects with similar objectives have been initiated, and communities focused on developmental robotics, autonomous mental development (AMD [56.31]), and epigenetic robotics have emerged [56.32]. As of the early 21st century, many companies and academic researchers have become involved with humanoid robots, and there are numerous humanoid robots across the world with distinctive features. 56.2.1 Different Forms Today, humanoid robots come in a variety of shapes and sizes that emulate different aspects of human form and behavior (Fig. 56.7). As discussed, the motivations that have driven the development of humanoid robots vary widely. These diverse motivations have lead to a variFig. 56.7 Kismet is an example of a humanoid head for social interaction Fig. 56.8 The NASA Robonaut consists of an upper body placed on a wheeled mobile base ety of humanoid robots that selectively emphasize some human characteristics, while deviating from others. One of the most noticeable axes of variation in humanoid robots is the presence or absence of body parts. Some humanoid robots have focused solely on the head and face, others have a head with two arms mounted to a stationary torso, or a torso with wheels (see, for example, Fig. 56.8), and still others have an articulate and expressive face with arms, legs, and a torso. Clearly, this variation in form impacts the ways in which the robot can be used, especially in terms of mobility, manipulation, whole-body activities, and human–robot interaction. 56.2.2 Different Degrees of Freedom Humanoid robots also tend to emulate some degrees of freedom in the human body, while ignoring others. Humanoid robots focusing on facial expressivity often incorporate actuated degrees of freedom in the face to generate facial expressions akin to those that humans can generate with their facial muscles. Likewise, the upper body of humanoid robots usually includes two arms, each with a one-degree-of-freedom (one-DOF) rotary joint at the elbow and a three-DOF rotary joint for the shoulder, but rarely attempt to emulate the human shoulder’s ability to translate or the flexibility of the human spine [56.33, 34]. In general, humanoid robots tend to have a large number of degrees of freedom and a kinematic structure that may not be amenable to closed-form analysis due to redundancy and the lack of a closed-form inverse. This is in contrast to traditional industrial manipulators that are often engineered to have minimal redundancy (six DOFs) and more easily analyzed kinematic structures. Part G 56.2