正在加载图片...
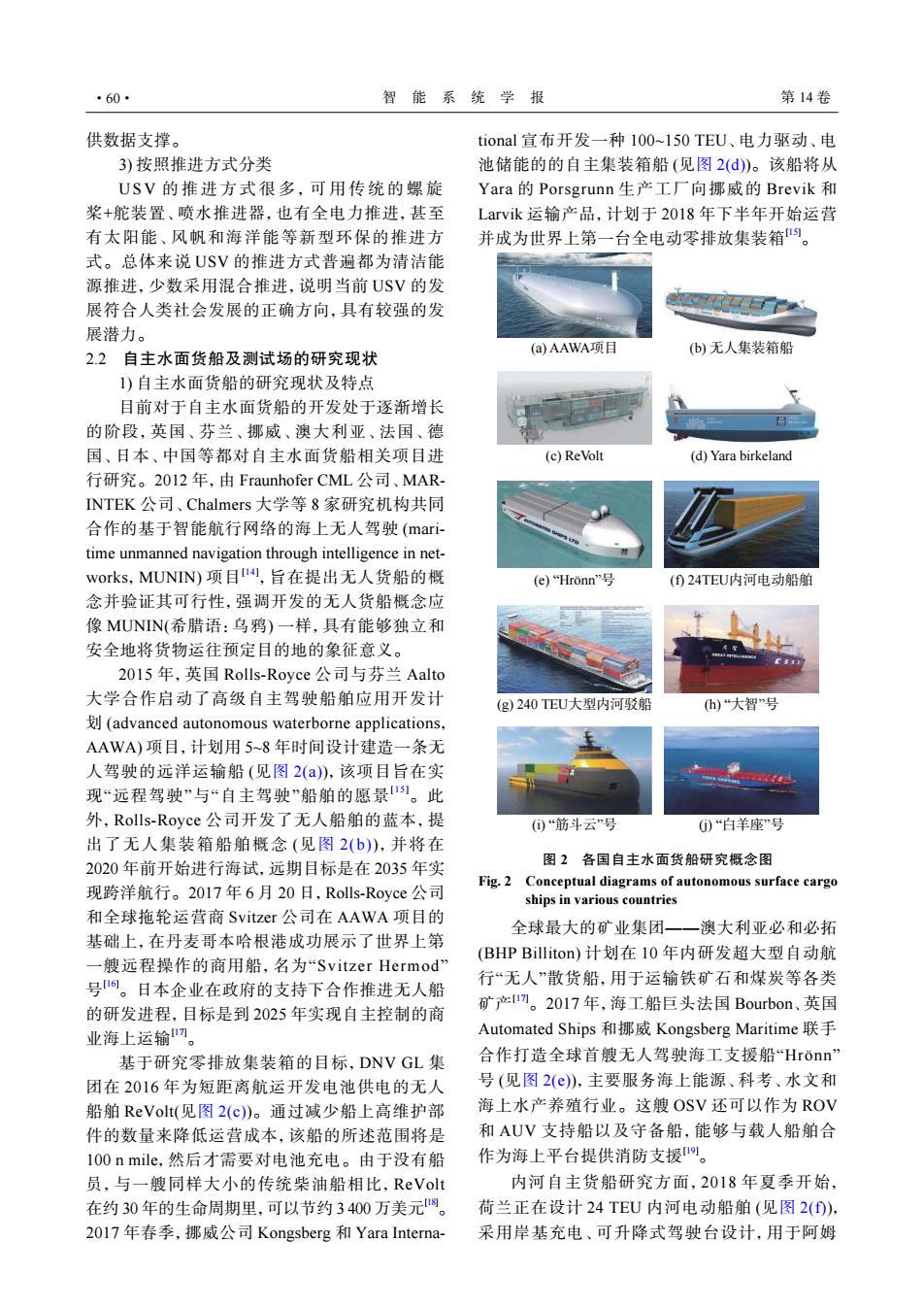
·60· 智能系统学报 第14卷 供数据支撑。 tional宣布开发一种100~150TEU、电力驱动、电 3)按照推进方式分类 池储能的的自主集装箱船(见图2(d)。该船将从 USV的推进方式很多,可用传统的螺旋 Yara的Porsgrunn生产工厂向挪威的Brevik和 桨+舵装置、喷水推进器,也有全电力推进,甚至 Larvik运输产品,计划于2018年下半年开始运营 有太阳能、风帆和海洋能等新型环保的推进方 并成为世界上第一台全电动零排放集装箱。 式。总体来说USV的推进方式普遍都为清洁能 源推进,少数采用混合推进,说明当前USV的发 展符合人类社会发展的正确方向,具有较强的发 展潜力。 2.2自主水面货船及测试场的研究现状 (a)AAWA项目 (b)无人集装箱船 1)自主水面货船的研究现状及特点 目前对于自主水面货船的开发处于逐渐增长 的阶段,英国、芬兰、挪威、澳大利亚、法国、德 国、日本、中国等都对自主水面货船相关项目进 (c)ReVolt (d)Yara birkeland 行研究。2012年,由Fraunhofer CML公司、MAR- INTEK公司、Chalmers大学等8家研究机构共同 合作的基于智能航行网络的海上无人驾驶(mari- time unmanned navigation through intelligence in net- works,.MUNN)项目,旨在提出无人货船的概 (e)Hronn”号 ()24TEU内河电动船舶 念并验证其可行性,强调开发的无人货船概念应 像MUNIN(希腊语:乌鸦)一样,具有能够独立和 安全地将货物运往预定目的地的象征意义。 2015年,英国Rolls-Royce公司与芬兰Aalto 大学合作启动了高级自主驾驶船舶应用开发计 (g)240TEU大型内河驳船 (h)“大智”号 (advanced autonomous waterborne applications, AAWA)项目,计划用5~8年时间设计建造一条无 人驾驶的远洋运输船(见图2(a),该项目旨在实 现“远程驾驶”与“自主驾驶”船舶的愿景1。此 外,Rolls-Royce公司开发了无人船舶的蓝本,提 (①“筋斗云”号 G)“白羊座”号 出了无人集装箱船舶概念(见图2(b),并将在 2020年前开始进行海试,远期目标是在2035年实 图2各国自主水面货船研究概念图 Fig.2 Conceptual diagrams of autonomous surface cargo 现跨洋航行。2017年6月20日,Rolls--Royce公司 ships in various countries 和全球拖轮运营商Svitzer公司在AAWA项目的 全球最大的矿业集团一一澳大利亚必和必拓 基础上,在丹麦哥本哈根港成功展示了世界上第 (BHP Billiton)计划在10年内研发超大型自动航 一艘远程操作的商用船,名为“Svitzer Hermod” 号。日本企业在政府的支持下合作推进无人船 行“无人”散货船,用于运输铁矿石和煤炭等各类 的研发进程,目标是到2025年实现自主控制的商 矿产7.2017年,海工船巨头法国Bourbon、英国 业海上运输7。 Automated Ships和挪威Kongsberg Maritime联手 基于研究零排放集装箱的目标,DNV GL集 合作打造全球首艘无人驾驶海工支援船“Hronn” 团在2016年为短距离航运开发电池供电的无人 号(见图2(©)),主要服务海上能源、科考、水文和 船舶Re Volt(见图2(c)。通过减少船上高维护部 海上水产养殖行业。这艘OSV还可以作为ROV 件的数量来降低运营成本,该船的所述范围将是 和AUV支持船以及守备船,能够与载人船舶合 100 n mile,.然后才需要对电池充电。由于没有船 作为海上平台提供消防支援。 员,与一艘同样大小的传统柴油船相比,ReVolt 内河自主货船研究方面,2018年夏季开始, 在约30年的生命周期里,可以节约3400万美元喝。 荷兰正在设计24TEU内河电动船舶(见图2(f), 2017年春季,挪威公司Kongsberg和Yara Interna- 采用岸基充电、可升降式驾驶台设计,用于阿姆供数据支撑。 3) 按照推进方式分类 U SV 的推进方式很多,可用传统的螺旋 桨+舵装置、喷水推进器,也有全电力推进,甚至 有太阳能、风帆和海洋能等新型环保的推进方 式。总体来说 USV 的推进方式普遍都为清洁能 源推进,少数采用混合推进,说明当前 USV 的发 展符合人类社会发展的正确方向,具有较强的发 展潜力。 2.2 自主水面货船及测试场的研究现状 1) 自主水面货船的研究现状及特点 目前对于自主水面货船的开发处于逐渐增长 的阶段,英国、芬兰、挪威、澳大利亚、法国、德 国、日本、中国等都对自主水面货船相关项目进 行研究。2012 年,由 Fraunhofer CML 公司、MARINTEK 公司、Chalmers 大学等 8 家研究机构共同 合作的基于智能航行网络的海上无人驾驶 (maritime unmanned navigation through intelligence in networks,MUNIN) 项目[14] ,旨在提出无人货船的概 念并验证其可行性,强调开发的无人货船概念应 像 MUNIN(希腊语:乌鸦) 一样,具有能够独立和 安全地将货物运往预定目的地的象征意义。 2015 年,英国 Rolls-Royce 公司与芬兰 Aalto 大学合作启动了高级自主驾驶船舶应用开发计 划 (advanced autonomous waterborne applications, AAWA) 项目,计划用 5~8 年时间设计建造一条无 人驾驶的远洋运输船 (见图 2(a)),该项目旨在实 现“远程驾驶”与“自主驾驶”船舶的愿景[15]。此 外,Rolls-Royce 公司开发了无人船舶的蓝本,提 出了无人集装箱船舶概念 (见图 2(b)),并将在 2020 年前开始进行海试,远期目标是在 2035 年实 现跨洋航行。2017 年 6 月 20 日,Rolls-Royce 公司 和全球拖轮运营商 Svitzer 公司在 AAWA 项目的 基础上,在丹麦哥本哈根港成功展示了世界上第 一艘远程操作的商用船,名为“Svitzer Hermod” 号 [16]。日本企业在政府的支持下合作推进无人船 的研发进程,目标是到 2025 年实现自主控制的商 业海上运输[17]。 基于研究零排放集装箱的目标,DNV GL 集 团在 2016 年为短距离航运开发电池供电的无人 船舶 ReVolt(见图 2(c))。通过减少船上高维护部 件的数量来降低运营成本,该船的所述范围将是 100 n mile,然后才需要对电池充电。由于没有船 员,与一艘同样大小的传统柴油船相比,ReVolt 在约 30 年的生命周期里,可以节约 3 400 万美元[18]。 2017 年春季,挪威公司 Kongsberg 和 Yara International 宣布开发一种 100~150 TEU、电力驱动、电 池储能的的自主集装箱船 (见图 2(d))。该船将从 Yara 的 Porsgrunn 生产工厂向挪威的 Brevik 和 Larvik 运输产品,计划于 2018 年下半年开始运营 并成为世界上第一台全电动零排放集装箱[15]。 全球最大的矿业集团——澳大利亚必和必拓 (BHP Billiton) 计划在 10 年内研发超大型自动航 行“无人”散货船,用于运输铁矿石和煤炭等各类 矿产[17]。2017 年,海工船巨头法国 Bourbon、英国 Automated Ships 和挪威 Kongsberg Maritime 联手 合作打造全球首艘无人驾驶海工支援船“Hrönn” 号 (见图 2(e)),主要服务海上能源、科考、水文和 海上水产养殖行业。这艘 OSV 还可以作为 ROV 和 AUV 支持船以及守备船,能够与载人船舶合 作为海上平台提供消防支援[19]。 内河自主货船研究方面,2018 年夏季开始, 荷兰正在设计 24 TEU 内河电动船舶 (见图 2(f)), 采用岸基充电、可升降式驾驶台设计,用于阿姆 (a) AAWA项目 (b) 无人集装箱船 (c) ReVolt (d) Yara birkeland (e) “Hrönn”号 (g) 240 TEU大型内河驳船 (h) “大智”号 (i) “筋斗云”号 (j) “白羊座”号 (f) 24TEU内河电动船舶 图 2 各国自主水面货船研究概念图 Fig. 2 Conceptual diagrams of autonomous surface cargo ships in various countries ·60· 智 能 系 统 学 报 第 14 卷