正在加载图片...
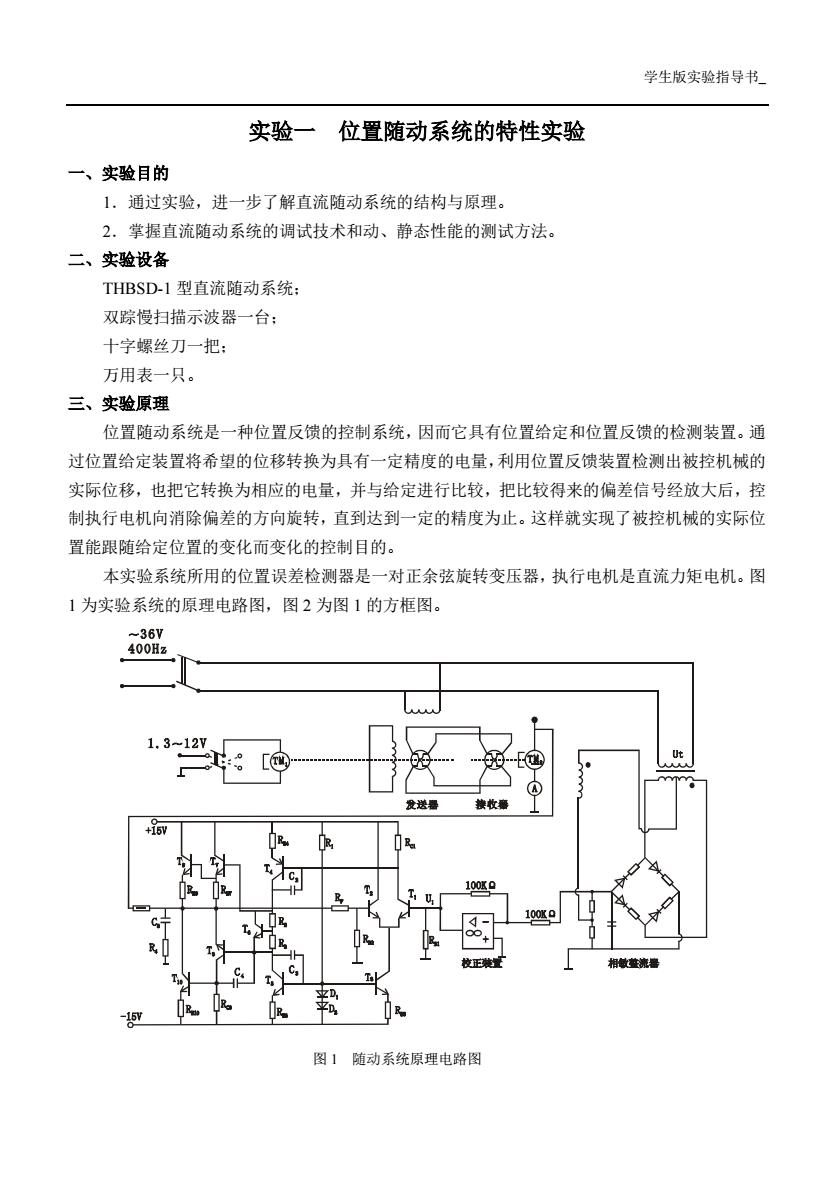
学生版实验指导书_ 实验一位置随动系统的特性实验 一、实验目的 1.通过实验,进一步了解直流随动系统的结构与原理。 2.掌握直流随动系统的调试技术和动、静态性能的测试方法。 二、实验设备 THBSD-1型直流随动系统: 双踪慢扫描示波器一台: 十字螺丝刀一把: 万用表一只。 三、实验原理 位置随动系统是一种位置反馈的控制系统,因而它具有位置给定和位置反馈的检测装置。通 过位置给定装置将希望的位移转换为具有一定精度的电量,利用位置反馈装置检测出被控机械的 实际位移,也把它转换为相应的电量,并与给定进行比较,把比较得来的偏差信号经放大后,控 制执行电机向消除偏差的方向旋转,直到达到一定的精度为止。这样就实现了被控机械的实际位 置能跟随给定位置的变化而变化的控制目的。 本实验系统所用的位置误差检测器是一对正余弦旋转变压器,执行电机是直流力矩电机。图 1为实验系统的原理电路图,图2为图1的方框图。 -36V 400Hz 1.3~12y 发进暑 接收塞 +15 R R.IR 100x0 100K0 相敏整流暑 图1随动系统原理电路图学生版实验指导书_ 实验一 位置随动系统的特性实验 一、实验目的 1.通过实验,进一步了解直流随动系统的结构与原理。 2.掌握直流随动系统的调试技术和动、静态性能的测试方法。 二、实验设备 THBSD-1 型直流随动系统; 双踪慢扫描示波器一台; 十字螺丝刀一把; 万用表一只。 三、实验原理 位置随动系统是一种位置反馈的控制系统,因而它具有位置给定和位置反馈的检测装置。通 过位置给定装置将希望的位移转换为具有一定精度的电量,利用位置反馈装置检测出被控机械的 实际位移,也把它转换为相应的电量,并与给定进行比较,把比较得来的偏差信号经放大后,控 制执行电机向消除偏差的方向旋转,直到达到一定的精度为止。这样就实现了被控机械的实际位 置能跟随给定位置的变化而变化的控制目的。 本实验系统所用的位置误差检测器是一对正余弦旋转变压器,执行电机是直流力矩电机。图 1 为实验系统的原理电路图,图 2 为图 1 的方框图。 图 1 随动系统原理电路图