正在加载图片...
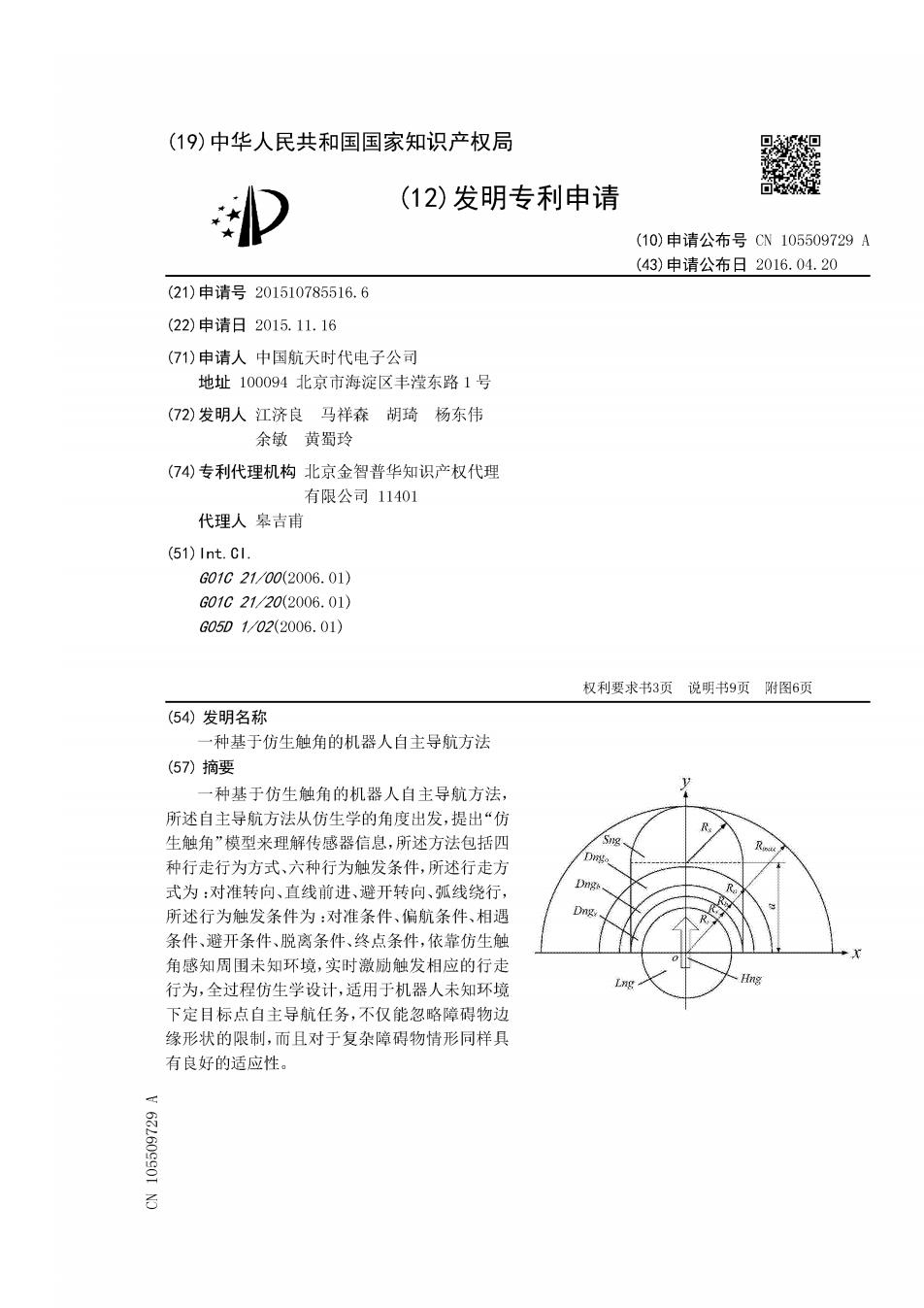
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN105509729A (43)申请公布日2016.04.20 (21)申请号201510785516.6 (22)申请日2015.11.16 (71)申请人中国航天时代电子公司 地址100094北京市海淀区丰滢东路1号 (72)发明人江济良马祥森胡琦杨东伟 余敏黄蜀玲 (74)专利代理机构北京金智普华知识产权代理 有限公司11401 代理人皋吉甫 (51)Int.CI. G01021/00(2006.01) G01C21/20(2006.01) G05D1/02(2006.01) 权利要求书3页说明书9页附图6页 (54)发明名称 ~种基于仿生触角的机器人自主导航方法 (57)摘要 一种基于仿生触角的机器人自主导航方法, 所述自主导航方法从仿生学的角度出发,提出“仿 生触角”模型来理解传感器信息,所述方法包括四 Sng 种行走行为方式、六种行为触发条件,所述行走方 式为:对准转向、直线前进、避开转向、弧线绕行, Dng 所述行为触发条件为:对准条件、偏航条件、相遇 Dnga 条件、避开条件、脱离条件、终点条件,依靠仿生触 角感知周围未知环境,实时激励触发相应的行走 行为,全过程仿生学设计,适用于机器人未知环境 Lng Hng 下定目标点自主导航任务,不仅能忽略障碍物边 缘形状的限制,而且对于复杂障碍物情形同样具 有良好的适应性。 62160990真