正在加载图片...
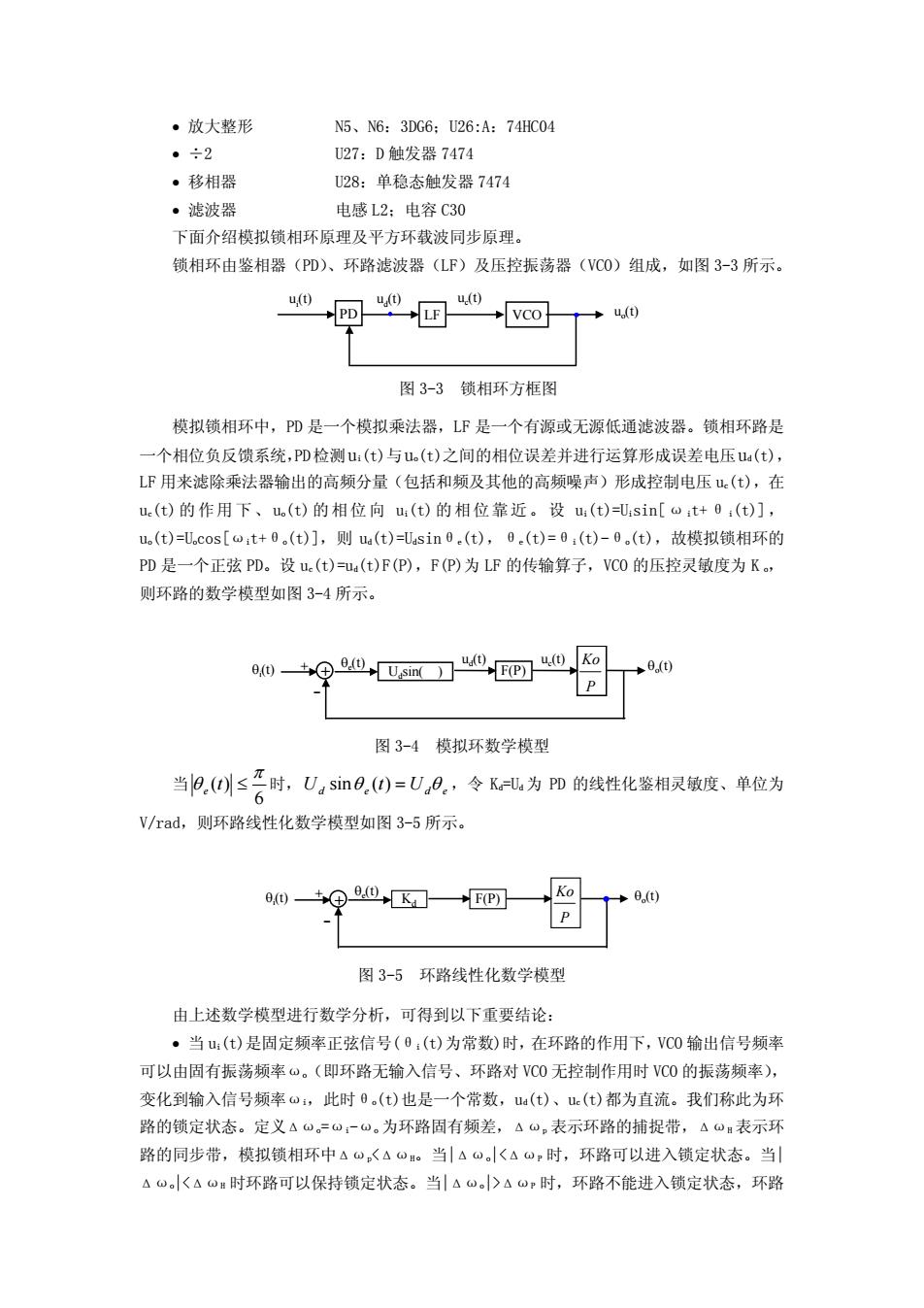
。放大整形 N5、N6:3DG6:126:A:74HC04 ·÷2 U27:D触发器7474 ·移相器 28:单稳态触发器7474 ·滤波器 电感L2:电容C30 下面介绍榄拟镜相环原理及平方环载波同步原理」 锁相环由鉴相器(PD)、环路滤波器(LF)及压控振荡器(VCO)组成,如图3-3所示。 PD @0 VCO 图33锁相环方框图 模拟锁相环中,PD是一个模拟乘法器,LF是一个有源或无源低通滤波器。锁相环路是 一个相位负反馈系统,PD检测u:()与山.(t)之间的相位误差并进行运算形成误差电压山(t), LF用来滤除乘法器输出的高频分量(包括和频及其他的高频噪声)形成控制电压山(t),在 u(t)的作用下、L(t)的相位向u:(t)的相位靠近。设u:(t)=Usin[w:t+0,(t)] u()=cos[t+0。(t)],则a(t)=sin0.(t),0.(t)=0:(t)-0.(t),故模拟锁相环的 PD是一个正弦PD。设山.(t)=u(t)F(P),F(P)为LF的传输算子,VC0的压控灵敏度为R, 则环路的数学模型如图3-4所示。 + 图34模拟环数学模型 当9.()s时,Uasin0.()=U,B。,令K为PD的线性化鉴相灵敏度、单位为 V/红ad,则环路线性化数学模型如图3-5所示. Ko +0 图3-5环路线性化数学模型 由上述数学模型进行数学分析,可得到以下重要结论: ·当u(t)是固定频率正弦信号(0:(t)为常数)时,在环路的作用下,VC0输出信号频* 可以由周有振荡颜率。(即环路无输入信号、环路对VC0无控制作用时VC0的振荡频率) 变化到输入信号频率o,此时日.(t)也是一个常数,(t)、山.(t)都为直流。我们称此为环 路的锁定状态。定义40,=:一。为环路固有频差,4表示环路的捕捉带,表示环 路的同步带,模拟锁相环中△o〈△o。当|△@<△“,时,环路可以进入锁定状态。当| A《#时环路可以保持锁定状态。当|△>△r时,环路不能进入锁定状态,环路 • 放大整形 N5、N6:3DG6;U26:A:74HC04 • ÷2 U27:D 触发器 7474 • 移相器 U28:单稳态触发器 7474 • 滤波器 电感 L2;电容 C30 下面介绍模拟锁相环原理及平方环载波同步原理。 锁相环由鉴相器(PD)、环路滤波器(LF)及压控振荡器(VCO)组成,如图 3-3 所示。 uc(t) PD LF VCO uo(t) ui (t) ud(t) 图 3-3 锁相环方框图 模拟锁相环中,PD 是一个模拟乘法器,LF 是一个有源或无源低通滤波器。锁相环路是 一个相位负反馈系统,PD检测ui(t)与uo(t)之间的相位误差并进行运算形成误差电压ud(t), LF 用来滤除乘法器输出的高频分量(包括和频及其他的高频噪声)形成控制电压 uc(t),在 uc(t)的作用下、 uo(t)的相位向 ui(t)的相位靠近。设 ui(t)=Uisin[ωit+θi(t)], uo(t)=Uocos[ωit+θo(t)],则 ud(t)=Udsinθe(t),θe(t)=θi(t)-θo(t),故模拟锁相环的 PD 是一个正弦 PD。设 uc(t)=ud(t)F(P),F(P)为 LF 的传输算子,VCO 的压控灵敏度为 K o, 则环路的数学模型如图 3-4 所示。 + Udsin( ) F(P) P Ko θi (t) θe(t) uc(t) θo(t) ud(t) + - 图 3-4 模拟环数学模型 当 6 ( ) π θ e t ≤ 时, d e Ud e U sinθ (t) = θ ,令 Kd=Ud 为 PD 的线性化鉴相灵敏度、单位为 V/rad,则环路线性化数学模型如图 3-5 所示。 + Kd F(P) P Ko θi (t) θe(t) θo + (t) - 图 3-5 环路线性化数学模型 由上述数学模型进行数学分析,可得到以下重要结论: • 当 ui(t)是固定频率正弦信号(θi(t)为常数)时,在环路的作用下,VCO 输出信号频率 可以由固有振荡频率ωo(即环路无输入信号、环路对 VCO 无控制作用时 VCO 的振荡频率), 变化到输入信号频率ωi,此时θo(t)也是一个常数,ud(t)、uc(t)都为直流。我们称此为环 路的锁定状态。定义Δωo=ωi-ωo 为环路固有频差,Δωp 表示环路的捕捉带,ΔωH 表示环 路的同步带,模拟锁相环中Δωp<ΔωH。当|Δωo|<ΔωP 时,环路可以进入锁定状态。当| Δωo|<ΔωH 时环路可以保持锁定状态。当|Δωo|>ΔωP 时,环路不能进入锁定状态,环路