正在加载图片...
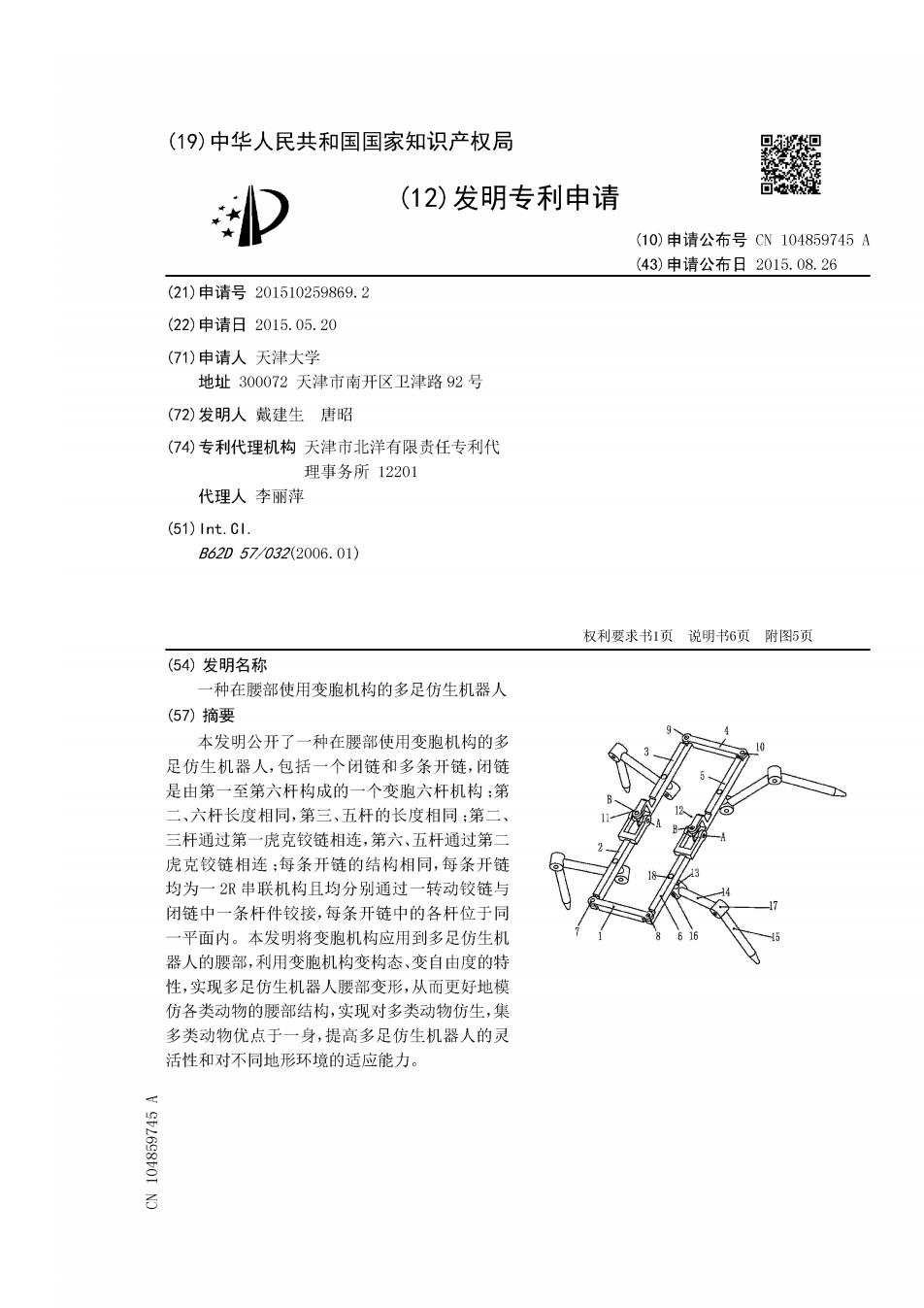
(19)中华人民共和国国家知识产权局 (12)发明专利申请 ▣5 (10)申请公布号CN104859745A (43)申请公布日2015.08.26 (21)申请号201510259869.2 (22)申请日2015.05.20 (71)申请人天津大学 地址300072天津市南开区卫津路92号 (72)发明人戴建生唐昭 (74)专利代理机构天津市北洋有限责任专利代 理事务所12201 代理人李丽萍 (51)1nt.Cl. B62D57032(2006.01) 权利要求书1页说明书6页附图5页 (54)发明名称 一种在腰部使用变胞机构的多足仿生机器人 (57)摘要 本发明公开了一种在腰部使用变胞机构的多 足仿生机器人,包括一个闭链和多条开链,闭链 是由第一至第六杆构成的一个变胞六杆机构:第 二、六杆长度相同,第三、五杆的长度相同:第二、 三杆通过第一虎克铰链相连,第六、五杆通过第二 虎克铰链相连:每条开链的结构相同,每条开链 均为一2R串联机构且均分别通过一转动铰链与 闭链中一条杆件铰接,每条开链中的各杆位于同 一平面内。本发明将变胞机构应用到多足仿生机 器人的腰部,利用变胞机构变构态、变自由度的特 性,实现多足仿生机器人腰部变形,从而更好地模 仿各类动物的腰部结构,实现对多类动物仿生,集 多类动物优点于一身,提高多足仿生机器人的灵 活性和对不同地形环境的适应能力。 G9760350