正在加载图片...
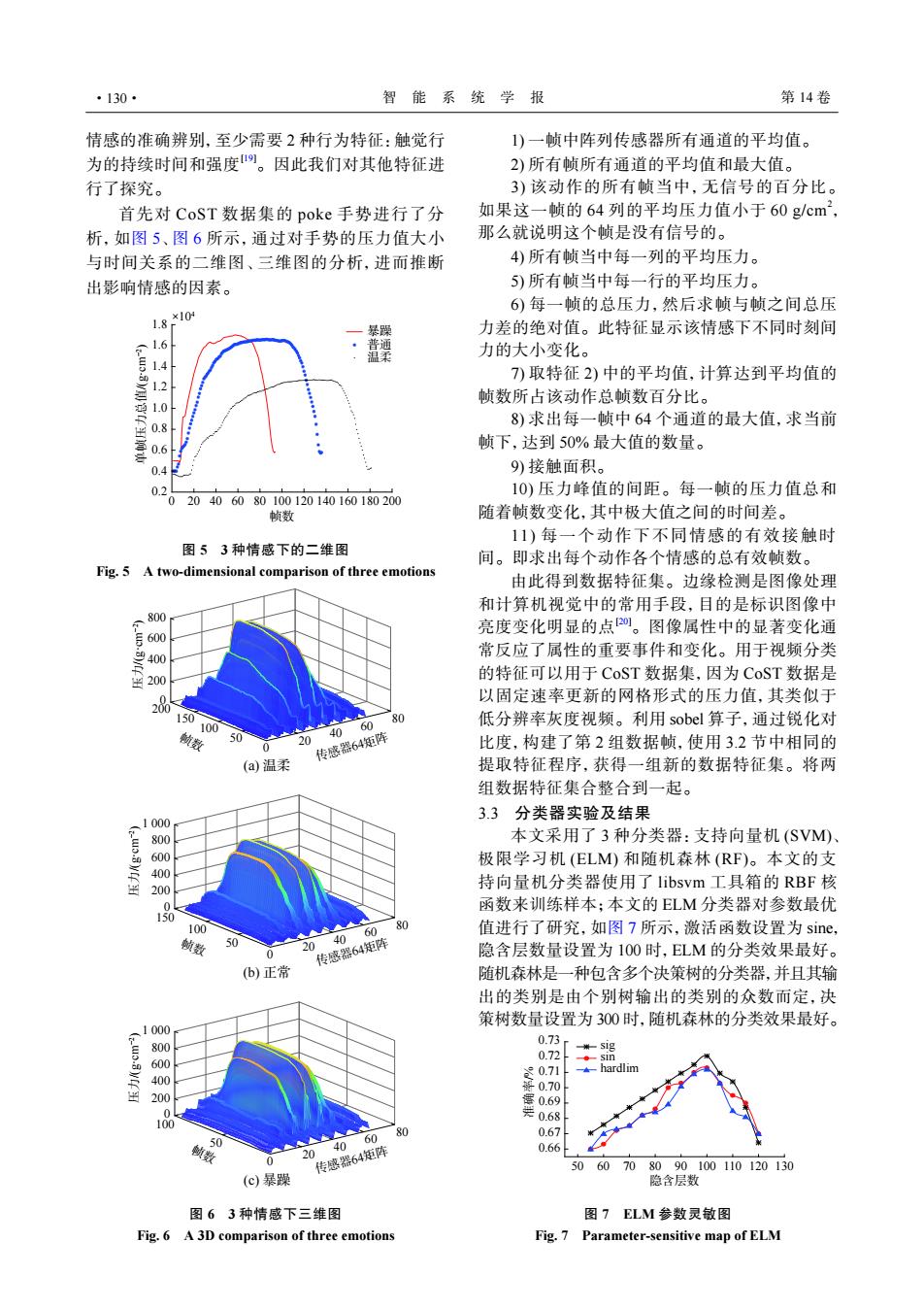
·130· 智能系统学报 第14卷 情感的准确辨别,至少需要2种行为特征:触觉行 1)一帧中阵列传感器所有通道的平均值。 为的持续时间和强度。因此我们对其他特征进 2)所有帧所有通道的平均值和最大值。 行了探究。 3)该动作的所有帧当中,无信号的百分比。 首先对CoST数据集的poke手势进行了分 如果这一帧的64列的平均压力值小于60g/cm2, 析,如图5、图6所示,通过对手势的压力值大小 那么就说明这个帧是没有信号的。 与时间关系的二维图、三维图的分析,进而推断 4)所有帧当中每一列的平均压力。 出影响情感的因素。 5)所有帧当中每一行的平均压力。 6)每一帧的总压力,然后求帧与帧之间总压 ×10H 1.8 暴躁 力差的绝对值。此特征显示该情感下不同时刻间 1.6 普 温柔 力的大小变化。 7)取特征2)中的平均值,计算达到平均值的 1.2 1.0 帧数所占该动作总帧数百分比。 0.8 8)求出每一帧中64个通道的最大值,求当前 0.6 帧下,达到50%最大值的数量。 0.4 9)接触面积。 0.2 10)压力峰值的间距。每一帧的压力值总和 020406080100120140160180200 帧数 随着帧数变化,其中极大值之间的时间差。 11)每一个动作下不同情感的有效接触时 图53种情感下的二维图 间。即求出每个动作各个情感的总有效帧数。 Fig.5 A two-dimensional comparison of three emotions 由此得到数据特征集。边缘检测是图像处理 和计算机视觉中的常用手段,目的是标识图像中 800 亮度变化明显的点0。图像属性中的显著变化通 号600 400 常反应了属性的重要事件和变化。用于视频分类 的特征可以用于CoST数据集,因为CoST数据是 以固定速率更新的网格形式的压力值,其类似于 150 100 40 60 80 低分辨率灰度视频。利用sobel算子,通过锐化对 帧数 50 0 20 传感器64矩阵 比度,构建了第2组数据帧,使用32节中相同的 (a)温柔 提取特征程序,获得一组新的数据特征集。将两 组数据特征集合整合到一起。 3.3分类器实验及结果 1000 8 本文采用了3种分类器:支持向量机(SVM) 极限学习机(ELM)和随机森林(RF)。本文的支 400 200 持向量机分类器使用了libsvm工具箱的RBF核 0 函数来训练样本;本文的ELM分类器对参数最优 100 80 60 值进行了研究,如图7所示,激活函数设置为sine, 顿数 50 40 传感器64矩阵 20 0 隐含层数量设置为100时,ELM的分类效果最好。 (b)正常 随机森林是一种包含多个决策树的分类器,并且其输 出的类别是由个别树输出的类别的众数而定,决 策树数量设置为300时,随机森林的分类效果最好。 800 0.73 600 0.72 州-S1g ◆-s1n hardlim 400 0.71 解0.70 200 0.69 0 0.68 60 80 0.67 0 数 2 40 传感器64矩阵 0.66 0 50 60708090100110120130 (c)暴躁 隐含层数 图63种情感下三维图 图7ELM参数灵敏图 Fig.6 A 3D comparison of three emotions Fig.7 Parameter-sensitive map of ELM情感的准确辨别,至少需要 2 种行为特征:触觉行 为的持续时间和强度 [19]。因此我们对其他特征进 行了探究。 首先对 CoST 数据集的 poke 手势进行了分 析,如图 5、图 6 所示,通过对手势的压力值大小 与时间关系的二维图、三维图的分析,进而推断 出影响情感的因素。 1) 一帧中阵列传感器所有通道的平均值。 2) 所有帧所有通道的平均值和最大值。 3) 该动作的所有帧当中,无信号的百分比。 如果这一帧的 64 列的平均压力值小于 60 g/cm2 , 那么就说明这个帧是没有信号的。 4) 所有帧当中每一列的平均压力。 5) 所有帧当中每一行的平均压力。 6) 每一帧的总压力,然后求帧与帧之间总压 力差的绝对值。此特征显示该情感下不同时刻间 力的大小变化。 7) 取特征 2) 中的平均值,计算达到平均值的 帧数所占该动作总帧数百分比。 8) 求出每一帧中 64 个通道的最大值,求当前 帧下,达到 50% 最大值的数量。 9) 接触面积。 10) 压力峰值的间距。每一帧的压力值总和 随着帧数变化,其中极大值之间的时间差。 11) 每一个动作下不同情感的有效接触时 间。即求出每个动作各个情感的总有效帧数。 由此得到数据特征集。边缘检测是图像处理 和计算机视觉中的常用手段,目的是标识图像中 亮度变化明显的点[20]。图像属性中的显著变化通 常反应了属性的重要事件和变化。用于视频分类 的特征可以用于 CoST 数据集,因为 CoST 数据是 以固定速率更新的网格形式的压力值,其类似于 低分辨率灰度视频。利用 sobel 算子,通过锐化对 比度,构建了第 2 组数据帧,使用 3.2 节中相同的 提取特征程序,获得一组新的数据特征集。将两 组数据特征集合整合到一起。 3.3 分类器实验及结果 本文采用了 3 种分类器:支持向量机 (SVM)、 极限学习机 (ELM) 和随机森林 (RF)。本文的支 持向量机分类器使用了 libsvm 工具箱的 RBF 核 函数来训练样本;本文的 ELM 分类器对参数最优 值进行了研究,如图 7 所示,激活函数设置为 sine, 隐含层数量设置为 100 时,ELM 的分类效果最好。 随机森林是一种包含多个决策树的分类器,并且其输 出的类别是由个别树输出的类别的众数而定,决 策树数量设置为 300 时,随机森林的分类效果最好。 0 20 40 60 80 100 120 140 160 180 200 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 暴躁 普通 温柔 单帧压力总值/(g·cm−2 ) 帧数 ×104 图 5 3 种情感下的二维图 Fig. 5 A two-dimensional comparison of three emotions (b) 正常 (a) 温柔 0 200 200 150 80 400 压力/(g·cm−2 ) 60 600 帧数 100 800 40 50 20 0 传感器64矩阵 0 150 200 400 80 压力/(g·cm−2 ) 600 60 帧数 800 1 000 40 100 50 20 0 传感器64矩阵 0 100 200 400 80 压力/(g·cm−2 ) 600 60 帧数 800 50 1 000 40 20 0 传感器64矩阵 (c) 暴躁 图 6 3 种情感下三维图 Fig. 6 A 3D comparison of three emotions 50 60 70 80 90 100 110 120 130 0.66 0.67 0.68 0.69 0.70 0.71 0.72 0.73 sig sin hardlim 隐含层数 准确率/% 图 7 ELM 参数灵敏图 Fig. 7 Parameter-sensitive map of ELM ·130· 智 能 系 统 学 报 第 14 卷