正在加载图片...
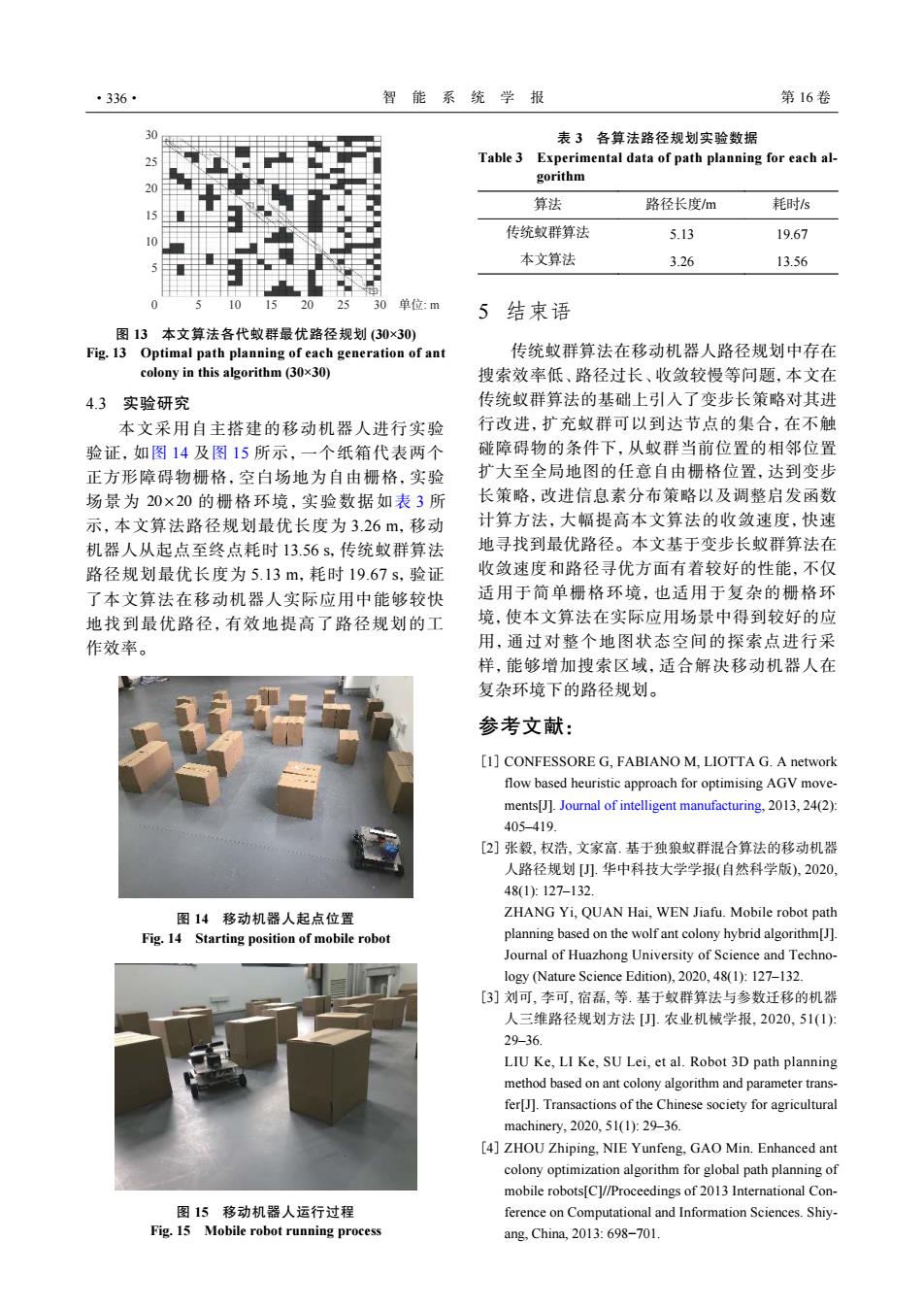
·336· 智能系统学报 第16卷 30 表3各算法路径规划实验数据 25 Table 3 Experimental data of path planning for each al- gorithm 20 算法 路径长度/m 耗时s 0 传统蚁群算法 5.13 19.67 本文算法 3.26 13.56 101520 25 30单位:m 5结束语 图13本文算法各代蚊群最优路径规划(30×30) Fig.13 Optimal path planning of each generation of ant 传统蚁群算法在移动机器人路径规划中存在 colony in this algorithm (30x30) 搜索效率低、路径过长、收敛较慢等问题,本文在 4.3实验研究 传统蚁群算法的基础上引入了变步长策略对其进 本文采用自主搭建的移动机器人进行实验 行改进,扩充蚁群可以到达节点的集合,在不触 验证,如图14及图15所示,一个纸箱代表两个 碰障碍物的条件下,从蚁群当前位置的相邻位置 正方形障碍物栅格,空白场地为自由栅格,实验 扩大至全局地图的任意自由栅格位置,达到变步 场景为20×20的栅格环境,实验数据如表3所 长策略,改进信息素分布策略以及调整启发函数 示,本文算法路径规划最优长度为3.26m,移动 计算方法,大幅提高本文算法的收敛速度,快速 机器人从起点至终点耗时13.56s,传统蚁群算法 地寻找到最优路径。本文基于变步长蚁群算法在 路径规划最优长度为5.13m,耗时19.67s,验证 收敛速度和路径寻优方面有着较好的性能,不仅 了本文算法在移动机器人实际应用中能够较快 适用于简单栅格环境,也适用于复杂的栅格环 地找到最优路径,有效地提高了路径规划的工 境,使本文算法在实际应用场景中得到较好的应 作效率。 用,通过对整个地图状态空间的探索点进行采 样,能够增加搜索区域,适合解决移动机器人在 复杂环境下的路径规划。 参考文献: [1]CONFESSORE G.FABIANO M.LIOTTA G.A network flow based heuristic approach for optimising AGV move- ments[J].Journal of intelligent manufacturing,2013,24(2): 405-419. [2]张毅,权浩,文家富.基于独狼蚁群混合算法的移动机器 人路径规划[).华中科技大学学报(自然科学版),2020, 48(1:127-132, 图14移动机器人起点位置 ZHANG Yi,QUAN Hai,WEN Jiafu.Mobile robot path Fig.14 Starting position of mobile robot planning based on the wolf ant colony hybrid algorithm[J]. Journal of Huazhong University of Science and Techno- logy (Nature Science Edition),2020,48(1):127-132. [3]刘可,李可,宿磊,等.基于蚁群算法与参数迁移的机器 人三维路径规划方法[J刀.农业机械学报,2020,51(1): 29-36. LIU Ke,LI Ke,SU Lei,et al.Robot 3D path planning method based on ant colony algorithm and parameter trans- fer[J].Transactions of the Chinese society for agricultural machinery,2020,51(1):29-36. [4]ZHOU Zhiping,NIE Yunfeng,GAO Min.Enhanced ant colony optimization algorithm for global path planning of mobile robots[C]//Proceedings of 2013 International Con- 图15移动机器人运行过程 ference on Computational and Information Sciences.Shiy- Fig.15 Mobile robot running process ang,China,.2013:698-70130 25 20 15 10 5 0 5 10 15 20 25 30 单位: m 图 13 本文算法各代蚁群最优路径规划 (30×30) Fig. 13 Optimal path planning of each generation of ant colony in this algorithm (30×30) 4.3 实验研究 20×20 本文采用自主搭建的移动机器人进行实验 验证,如图 14 及图 15 所示,一个纸箱代表两个 正方形障碍物栅格,空白场地为自由栅格,实验 场景为 的栅格环境,实验数据如表 3 所 示,本文算法路径规划最优长度为 3.26 m,移动 机器人从起点至终点耗时 13.56 s,传统蚁群算法 路径规划最优长度为 5.13 m,耗时 19.67 s,验证 了本文算法在移动机器人实际应用中能够较快 地找到最优路径,有效地提高了路径规划的工 作效率。 图 14 移动机器人起点位置 Fig. 14 Starting position of mobile robot 图 15 移动机器人运行过程 Fig. 15 Mobile robot running process 表 3 各算法路径规划实验数据 Table 3 Experimental data of path planning for each algorithm 算法 路径长度/m 耗时/s 传统蚁群算法 5.13 19.67 本文算法 3.26 13.56 5 结束语 传统蚁群算法在移动机器人路径规划中存在 搜索效率低、路径过长、收敛较慢等问题,本文在 传统蚁群算法的基础上引入了变步长策略对其进 行改进,扩充蚁群可以到达节点的集合,在不触 碰障碍物的条件下,从蚁群当前位置的相邻位置 扩大至全局地图的任意自由栅格位置,达到变步 长策略,改进信息素分布策略以及调整启发函数 计算方法,大幅提高本文算法的收敛速度,快速 地寻找到最优路径。本文基于变步长蚁群算法在 收敛速度和路径寻优方面有着较好的性能,不仅 适用于简单栅格环境,也适用于复杂的栅格环 境,使本文算法在实际应用场景中得到较好的应 用,通过对整个地图状态空间的探索点进行采 样,能够增加搜索区域,适合解决移动机器人在 复杂环境下的路径规划。 参考文献: CONFESSORE G, FABIANO M, LIOTTA G. A network flow based heuristic approach for optimising AGV movements[J]. Journal of intelligent manufacturing, 2013, 24(2): 405–419. [1] 张毅, 权浩, 文家富. 基于独狼蚁群混合算法的移动机器 人路径规划 [J]. 华中科技大学学报(自然科学版), 2020, 48(1): 127–132. ZHANG Yi, QUAN Hai, WEN Jiafu. Mobile robot path planning based on the wolf ant colony hybrid algorithm[J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2020, 48(1): 127–132. [2] 刘可, 李可, 宿磊, 等. 基于蚁群算法与参数迁移的机器 人三维路径规划方法 [J]. 农业机械学报, 2020, 51(1): 29–36. LIU Ke, LI Ke, SU Lei, et al. Robot 3D path planning method based on ant colony algorithm and parameter transfer[J]. Transactions of the Chinese society for agricultural machinery, 2020, 51(1): 29–36. [3] ZHOU Zhiping, NIE Yunfeng, GAO Min. Enhanced ant colony optimization algorithm for global path planning of mobile robots[C]//Proceedings of 2013 International Conference on Computational and Information Sciences. Shiyang, China, 2013: 698−701. [4] ·336· 智 能 系 统 学 报 第 16 卷