正在加载图片...
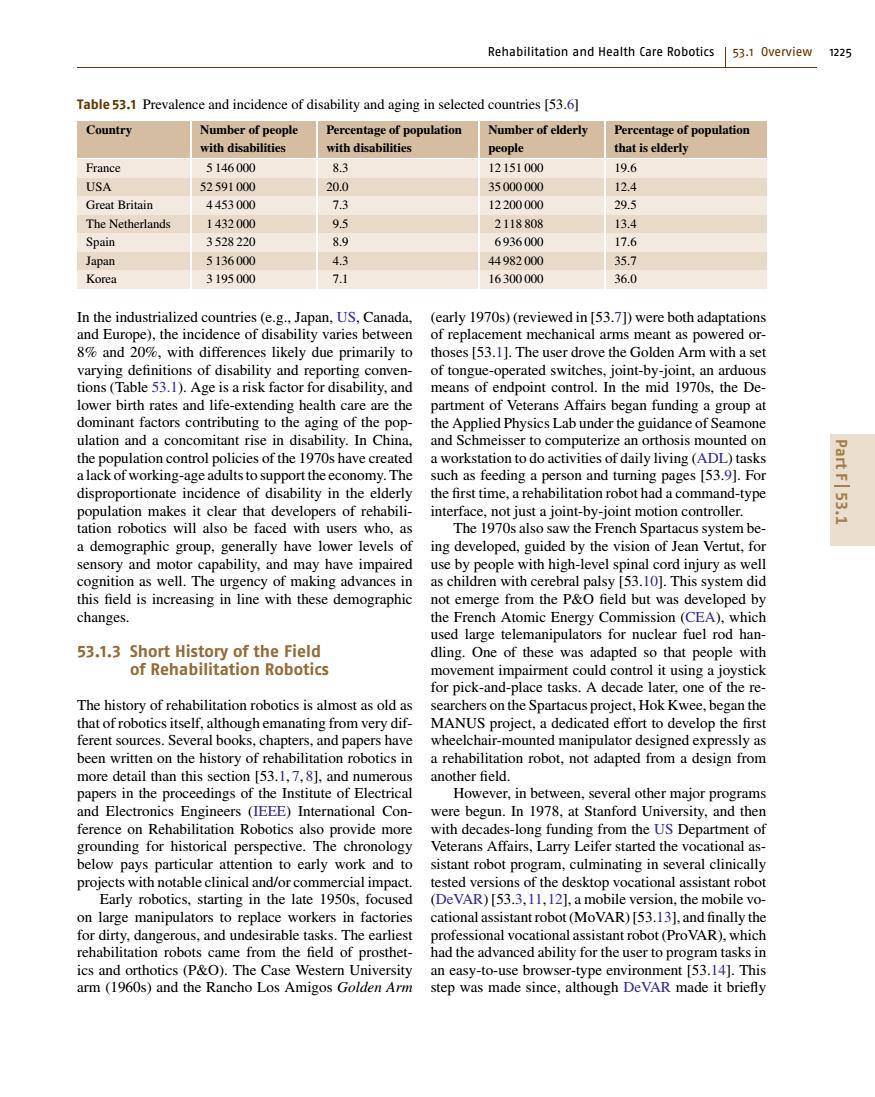
Rehabilitation and Health Care Robotics 53.1 Overview 1225 Table 53.1 Prevalence and incidence of disability and aging in selected countries [53.6] Country Number of people Percentage of population Number of elderly Percentage of population with disabilities with disabilities people that is elderly France 5146000 83 12151000 19.6 USA 52591000 20.0 35000000 12.4 Great Britain 4453000 7.3 12200000 29.5 The Netherlands 1432000 9.5 2118808 13.4 Spain 3528220 8.9 6936000 17.6 Japan 5136000 4.3 44982000 35.7 Korea 3195000 7.1 16300000 36.0 In the industrialized countries (e.g.,Japan,US,Canada, (early 1970s)(reviewed in [53.7])were both adaptations and Europe),the incidence of disability varies between of replacement mechanical arms meant as powered or- 8%and 20%,with differences likely due primarily to thoses [53.1].The user drove the Golden Arm with a set varying definitions of disability and reporting conven- of tongue-operated switches,joint-by-joint,an arduous tions (Table 53.1).Age is a risk factor for disability,and means of endpoint control.In the mid 1970s,the De- lower birth rates and life-extending health care are the partment of Veterans Affairs began funding a group at dominant factors contributing to the aging of the pop- the Applied Physics Lab under the guidance of Seamone ulation and a concomitant rise in disability.In China,and Schmeisser to computerize an orthosis mounted on the population control policies of the 1970s have created a workstation to do activities of daily living(ADL)tasks art alack of working-age adults to support theeconomy.The such as feeding a person and turning pages [53.9].For disproportionate incidence of disability in the elderly the first time,a rehabilitation robot had a command-type population makes it clear that developers of rehabili-interface,not just a joint-by-joint motion controller. tation robotics will also be faced with users who,as The 1970s also saw the French Spartacus system be- a demographic group,generally have lower levels of ing developed,guided by the vision of Jean Vertut,for sensory and motor capability,and may have impaired use by people with high-level spinal cord injury as well cognition as well.The urgency of making advances in as children with cerebral palsy [53.10].This system did this field is increasing in line with these demographic not emerge from the P&O field but was developed by changes. the French Atomic Energy Commission(CEA),which used large telemanipulators for nuclear fuel rod han- 53.1.3 Short History of the Field dling.One of these was adapted so that people with of Rehabilitation Robotics movement impairment could control it using a joystick for pick-and-place tasks.A decade later,one of the re- The history of rehabilitation robotics is almost as old as searchers on the Spartacus project,Hok Kwee,began the that of robotics itself,although emanating from very dif-MANUS project,a dedicated effort to develop the first ferent sources.Several books,chapters,and papers have wheelchair-mounted manipulator designed expressly as been written on the history of rehabilitation robotics in a rehabilitation robot,not adapted from a design from more detail than this section [53.1,7,8],and numerous another field. papers in the proceedings of the Institute of Electrical However,in between,several other major programs and Electronics Engineers (IEEE)International Con- were begun.In 1978,at Stanford University,and then ference on Rehabilitation Robotics also provide more with decades-long funding from the US Department of grounding for historical perspective.The chronology Veterans Affairs,Larry Leifer started the vocational as- below pays particular attention to early work and to sistant robot program,culminating in several clinically projects with notable clinical and/or commercial impact.tested versions of the desktop vocational assistant robot Early robotics,starting in the late 1950s,focused (DeVAR)[53.3,11,12],a mobile version,the mobile vo- on large manipulators to replace workers in factories cational assistant robot(MoVAR)[53.13],and finally the for dirty,dangerous,and undesirable tasks.The earliest professional vocational assistant robot(ProVAR),which rehabilitation robots came from the field of prosthet-had the advanced ability for the user to program tasks in ics and orthotics(P&O).The Case Western University an easy-to-use browser-type environment [53.14].This arm (1960s)and the Rancho Los Amigos Golden Arm step was made since,although DeVAR made it brieflyRehabilitation and Health Care Robotics 53.1 Overview 1225 Table 53.1 Prevalence and incidence of disability and aging in selected countries [53.6] Country Number of people Percentage of population Number of elderly Percentage of population with disabilities with disabilities people that is elderly France 5 146 000 8.3 12 151 000 19.6 USA 52 591 000 20.0 35 000 000 12.4 Great Britain 4 453 000 7.3 12 200 000 29.5 The Netherlands 1 432 000 9.5 2 118 808 13.4 Spain 3 528 220 8.9 6 936 000 17.6 Japan 5 136 000 4.3 44 982 000 35.7 Korea 3 195 000 7.1 16 300 000 36.0 In the industrialized countries (e.g., Japan, US, Canada, and Europe), the incidence of disability varies between 8% and 20%, with differences likely due primarily to varying definitions of disability and reporting conventions (Table 53.1). Age is a risk factor for disability, and lower birth rates and life-extending health care are the dominant factors contributing to the aging of the population and a concomitant rise in disability. In China, the population control policies of the 1970s have created a lack of working-age adults to support the economy. The disproportionate incidence of disability in the elderly population makes it clear that developers of rehabilitation robotics will also be faced with users who, as a demographic group, generally have lower levels of sensory and motor capability, and may have impaired cognition as well. The urgency of making advances in this field is increasing in line with these demographic changes. 53.1.3 Short History of the Field of Rehabilitation Robotics The history of rehabilitation robotics is almost as old as that of robotics itself, although emanating from very different sources. Several books, chapters, and papers have been written on the history of rehabilitation robotics in more detail than this section [53.1, 7, 8], and numerous papers in the proceedings of the Institute of Electrical and Electronics Engineers (IEEE) International Conference on Rehabilitation Robotics also provide more grounding for historical perspective. The chronology below pays particular attention to early work and to projects with notable clinical and/or commercial impact. Early robotics, starting in the late 1950s, focused on large manipulators to replace workers in factories for dirty, dangerous, and undesirable tasks. The earliest rehabilitation robots came from the field of prosthetics and orthotics (P&O). The Case Western University arm (1960s) and the Rancho Los Amigos Golden Arm (early 1970s) (reviewed in [53.7]) were both adaptations of replacement mechanical arms meant as powered orthoses [53.1]. The user drove the Golden Arm with a set of tongue-operated switches, joint-by-joint, an arduous means of endpoint control. In the mid 1970s, the Department of Veterans Affairs began funding a group at the Applied Physics Lab under the guidance of Seamone and Schmeisser to computerize an orthosis mounted on a workstation to do activities of daily living (ADL) tasks such as feeding a person and turning pages [53.9]. For the first time, a rehabilitation robot had a command-type interface, not just a joint-by-joint motion controller. The 1970s also saw the French Spartacus system being developed, guided by the vision of Jean Vertut, for use by people with high-level spinal cord injury as well as children with cerebral palsy [53.10]. This system did not emerge from the P&O field but was developed by the French Atomic Energy Commission (CEA), which used large telemanipulators for nuclear fuel rod handling. One of these was adapted so that people with movement impairment could control it using a joystick for pick-and-place tasks. A decade later, one of the researchers on the Spartacus project, Hok Kwee, began the MANUS project, a dedicated effort to develop the first wheelchair-mounted manipulator designed expressly as a rehabilitation robot, not adapted from a design from another field. However, in between, several other major programs were begun. In 1978, at Stanford University, and then with decades-long funding from the US Department of Veterans Affairs, Larry Leifer started the vocational assistant robot program, culminating in several clinically tested versions of the desktop vocational assistant robot (DeVAR) [53.3,11,12], a mobile version, the mobile vocational assistant robot (MoVAR) [53.13], and finally the professional vocational assistant robot (ProVAR), which had the advanced ability for the user to program tasks in an easy-to-use browser-type environment [53.14]. This step was made since, although DeVAR made it briefly Part F 53.1