正在加载图片...
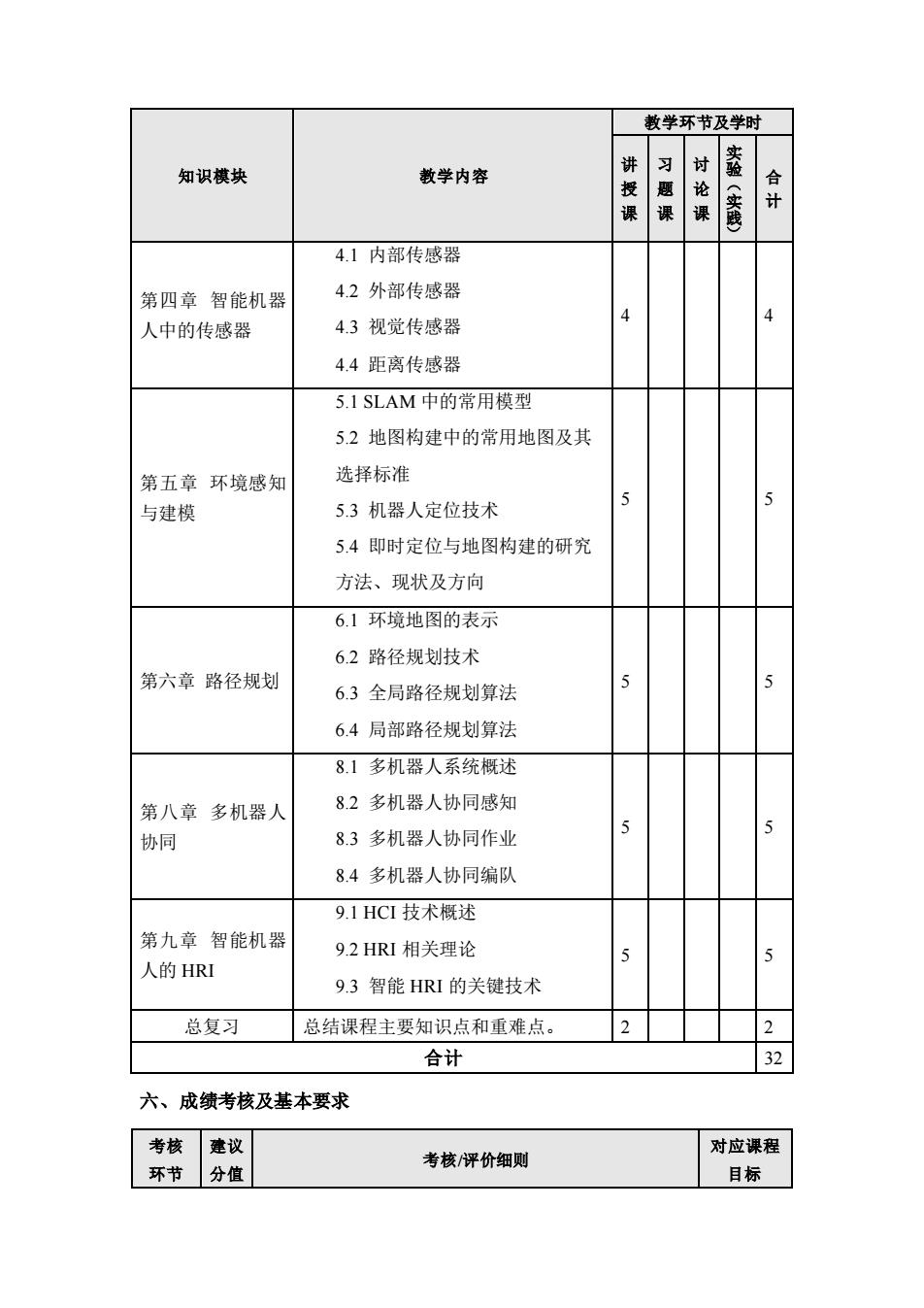
教学环节及学时 知识模块 教学内容 讲授课 讨论 实验(实践) 课 计 4.1内部传感器 第四章智能机器 4.2外部传感器 4 4 人中的传感器 4.3视觉传感器 4.4距离传感器 5.1SLAM中的常用模型 5.2地图构建中的常用地图及其 第五章环境感知 选择标准 5.3机器人定位技术 5 5 与建模 5.4即时定位与地图构建的研究 方法、现状及方向 6.1环境地图的表示 6.2路径规划技术 第六章路径规划 6.3全局路径规划算法 5 5 6.4局部路径规划算法 81多机器人系统概述 第八章多机器人 8.2多机器人协同感知 协同 8.3多机器人协同作业 5 5 8.4多机器人协同编队 9.1HCI技术概述 第九章智能机器 9.2HRI相关理论 5 5 人的HRI 9.3智能HRI的关键技术 总复习 总结课程主要知识点和重难点。 2 2 合计 32 六、成绩考核及基本要求 考核 建议 对应课程 考核/评价细则 环节 分值 目标知识模块 教学内容 教学环节及学时 讲 授 课 习 题 课 讨 论 课 实 验 ( 实 践 ) 合 计 第四章 智能机器 人中的传感器 4.1 内部传感器 4.2 外部传感器 4.3 视觉传感器 4.4 距离传感器 4 4 第五章 环境感知 与建模 5.1 SLAM 中的常用模型 5.2 地图构建中的常用地图及其 选择标准 5.3 机器人定位技术 5.4 即时定位与地图构建的研究 方法、现状及方向 5 5 第六章 路径规划 6.1 环境地图的表示 6.2 路径规划技术 6.3 全局路径规划算法 6.4 局部路径规划算法 5 5 第八章 多机器人 协同 8.1 多机器人系统概述 8.2 多机器人协同感知 8.3 多机器人协同作业 8.4 多机器人协同编队 5 5 第九章 智能机器 人的 HRI 9.1 HCI 技术概述 9.2 HRI 相关理论 9.3 智能 HRI 的关键技术 5 5 总复习 总结课程主要知识点和重难点。 2 2 合计 32 六、成绩考核及基本要求 考核 环节 建议 分值 考核/评价细则 对应课程 目标