正在加载图片...
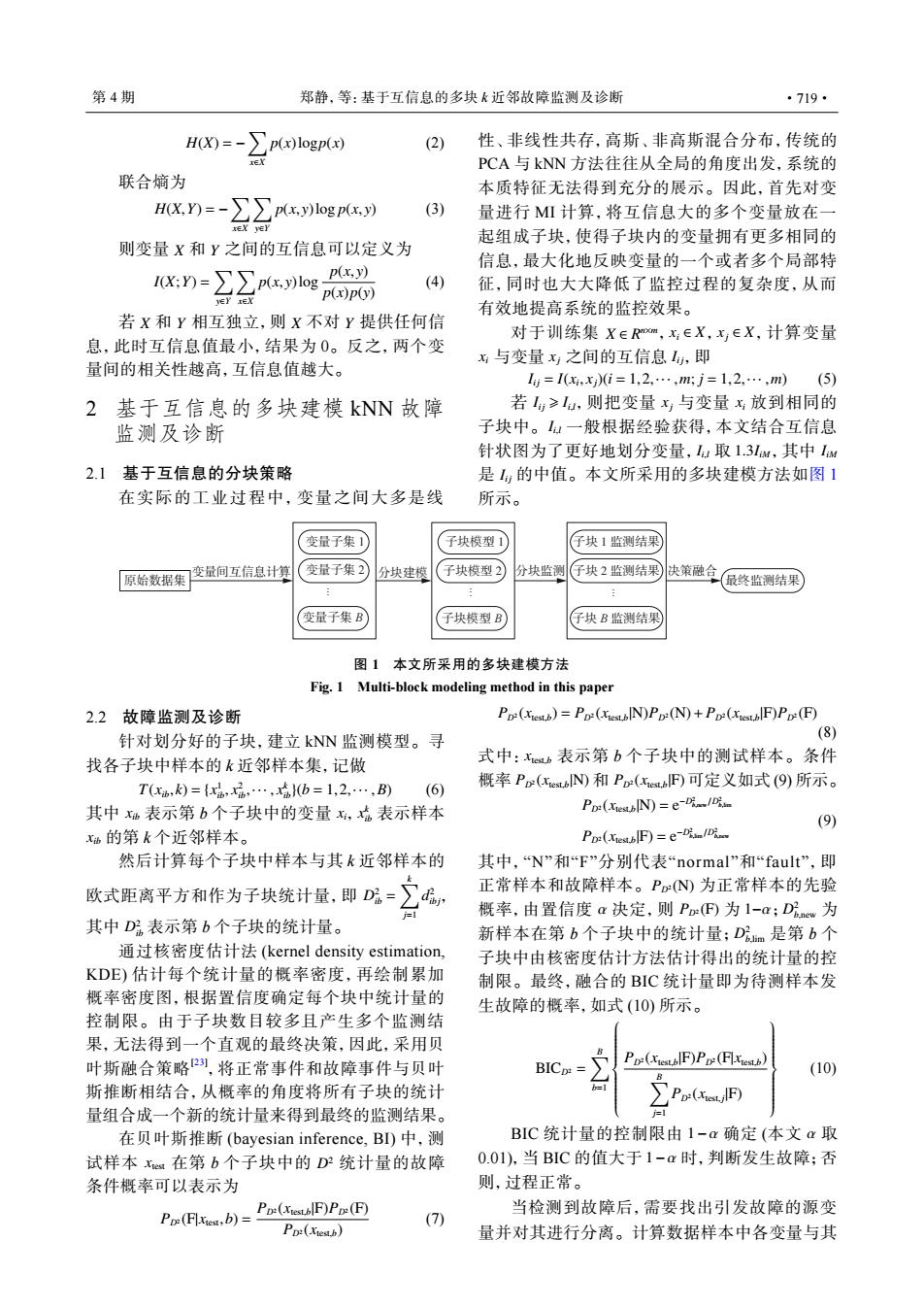
第4期 郑静,等:基于互信息的多块k近邻故障监测及诊断 ·719· H(X)= >p(x)logp(x) (2) 性、非线性共存,高斯、非高斯混合分布,传统的 PCA与kNN方法往往从全局的角度出发,系统的 联合嫡为 本质特征无法得到充分的展示。因此,首先对变 H(X.Y)=- p(x.y)logp(x.y) (3) 量进行MI计算,将互信息大的多个变量放在一 起组成子块,使得子块内的变量拥有更多相同的 则变量X和Y之间的互信息可以定义为 信息,最大化地反映变量的一个或者多个局部特 1x:)=∑∑p(x.y)log p(x,y) (4) 征,同时也大大降低了监控过程的复杂度,从而 JEY IEX p(x)p(y) 有效地提高系统的监控效果。 若X和y相互独立,则X不对Y提供任何信 息,此时互信息值最小,结果为0。反之,两个变 对于训练集X∈Rxm,:∈X,x∈X,计算变量 :与变量x之间的互信息,即 量间的相关性越高,互信息值越大。 l=I(x,xi=1,2,…,mj=1,2,…,m) (5) 2 基于互信息的多块建模kNN故障 若1≥1山,则把变量x与变量。放到相同的 监测及诊断 子块中。,一般根据经验获得,本文结合互信息 针状图为了更好地划分变量,:取1.31w,其中Iw 2.1基于互信息的分块策略 是,的中值。本文所采用的多块建模方法如图1 在实际的工业过程中,变量之间大多是线 所示。 变量子集 子块模型1 子块1监测结果 变量间互信息计算 变量子集2 分块建模 子块模型2 分块监测 子块2监测结果 决策融合 原始数据集 最终监测结果 变量子集B 子块模型B 子块B监测结果 图1本文所采用的多块建模方法 Fig.1 Multi-block modeling method in this paper 2.2故障监测及诊断 PD(xiesb)=PD:(xiestN)Pp:(N)+Pp:(xestF)PD(F) 针对划分好的子块,建立kNN监测模型。寻 (8) 找各子块中样本的k近邻样本集,记做 式中:xb表示第b个子块中的测试样本。条件 T(xb,k)={x,x,…,x点b=1,2,…,B) (6) 概率Po(iesto N)和P(xebF)可定义如式(⑨)所示。 其中x表示第b个子块中的变量x,点表示样本 Pp:(xtesN)=e-DiD (9) xb的第k个近邻样本。 PD:(xtsF)=e-DiID 然后计算每个子块中样本与其k近邻样本的 其中,“N”和“F”分别代表“normal'和“fault'”,即 欧式距离平方和作为子块统计量,即D=∑, 正常样本和故障样本。PN)为正常样本的先验 概率,由置信度a决定,则PoF)为1-a;D2new为 其中D表示第b个子块的统计量。 新样本在第b个子块中的统计量;D%m是第b个 通过核密度估计法(kernel density estimation, 子块中由核密度估计方法估计得出的统计量的控 KDE)估计每个统计量的概率密度,再绘制累加 制限。最终,融合的BC统计量即为待测样本发 概率密度图,根据置信度确定每个块中统计量的 生故障的概率,如式(10)所示。 控制限。由于子块数目较多且产生多个监测结 果,无法得到一个直观的最终决策,因此,采用贝 叶斯融合策略2,将正常事件和故障事件与贝叶 Po:(iestbF)PD(Flxest (10) 斯推断相结合,从概率的角度将所有子块的统计 量组合成一个新的统计量来得到最终的监测结果。 在贝叶斯推断(bayesian inference,.B)中,测 BIC统计量的控制限由1-α确定(本文α取 试样本xem在第b个子块中的D2统计量的故障 0.01),当BIC的值大于1-a时,判断发生故障:否 条件概率可以表示为 则,过程正常。 Pr(F)=Po-(toF)P(F) 当检测到故障后,需要找出引发故障的源变 (7) Pp:(Xtestb) 量并对其进行分离。计算数据样本中各变量与其H(X) = − ∑ x∈X p(x)logp(x) (2) 联合熵为 H(X,Y) = − ∑ x∈X ∑ y∈Y p(x, y)log p(x, y) (3) 则变量 X 和 Y 之间的互信息可以定义为 I(X;Y) = ∑ y∈Y ∑ x∈X p(x, y)log p(x, y) p(x)p(y) (4) 若 X 和 Y 相互独立,则 X 不对 Y 提供任何信 息,此时互信息值最小,结果为 0。反之,两个变 量间的相关性越高,互信息值越大。 2 基于互信息的多块建模 kNN 故障 监测及诊断 2.1 基于互信息的分块策略 在实际的工业过程中,变量之间大多是线 性、非线性共存,高斯、非高斯混合分布,传统的 PCA 与 kNN 方法往往从全局的角度出发,系统的 本质特征无法得到充分的展示。因此,首先对变 量进行 MI 计算,将互信息大的多个变量放在一 起组成子块,使得子块内的变量拥有更多相同的 信息,最大化地反映变量的一个或者多个局部特 征,同时也大大降低了监控过程的复杂度,从而 有效地提高系统的监控效果。 X ∈ R n×m xi ∈ X xj ∈ X xi xj Ii j 对于训练集 , , ,计算变量 与变量 之间的互信息 ,即 Ii j = I(xi , xj)(i = 1,2,··· ,m; j = 1,2,··· ,m) (5) Ii j ⩾ Ii,l xj xi Ii,l Ii,l 1.3IiM IiM Ii j 若 ,则把变量 与变量 放到相同的 子块中。 一般根据经验获得,本文结合互信息 针状图为了更好地划分变量, 取 ,其中 是 的中值。本文所采用的多块建模方法如图 1 所示。 原始数据集 变量间互信息计算 变量子集 1 变量子集 2 变量子集 B ... 分块建模 子块模型 1 子块模型 2 ... 子块模型 B 分块监测 子块 1 监测结果 子块 2 监测结果 ... 子块 B 监测结果 最终监测结果 决策融合 图 1 本文所采用的多块建模方法 Fig. 1 Multi-block modeling method in this paper 2.2 故障监测及诊断 针对划分好的子块,建立 kNN 监测模型。寻 找各子块中样本的 k 近邻样本集,记做 T(xib, k) = {x 1 ib, x 2 ib,··· , x k ib}(b = 1,2,··· ,B) (6) xib xi x k ib xib 其中 表示第 b 个子块中的变量 , 表示样本 的第 k 个近邻样本。 D 2 ib = ∑k j=1 d 2 ib j D 2 ib 然后计算每个子块中样本与其 k 近邻样本的 欧式距离平方和作为子块统计量,即 , 其中 表示第 b 个子块的统计量。 通过核密度估计法 (kernel density estimation, KDE) 估计每个统计量的概率密度,再绘制累加 概率密度图,根据置信度确定每个块中统计量的 控制限。由于子块数目较多且产生多个监测结 果,无法得到一个直观的最终决策,因此,采用贝 叶斯融合策略[23] ,将正常事件和故障事件与贝叶 斯推断相结合,从概率的角度将所有子块的统计 量组合成一个新的统计量来得到最终的监测结果。 xtest D 2 在贝叶斯推断 (bayesian inference, BI) 中,测 试样本 在第 b 个子块中的 统计量的故障 条件概率可以表示为 PD2 (F|xtest,b) = PD2 (xtest,b|F)PD2 (F) PD2 (xtest,b) (7) PD2 (xtest,b) = PD2 (xtest,b|N)PD2 (N)+ PD2 (xtest,b|F)PD2 (F) (8) xtest,b PD2 (xtest,b|N) PD2 (xtest,b|F) 式中: 表示第 b 个子块中的测试样本。条件 概率 和 可定义如式 (9) 所示。 PD2 (xtest,b|N) = e −D 2 b,new /D 2 b,lim PD2 (xtest,b|F) = e −D 2 b,lim/D 2 b,new (9) PD2 (N) α PD2 (F) 1−α D 2 b,new D 2 b,lim 其中,“N”和“F”分别代表“normal”和“fault”,即 正常样本和故障样本。 为正常样本的先验 概率,由置信度 决定,则 为 ; 为 新样本在第 b 个子块中的统计量; 是第 b 个 子块中由核密度估计方法估计得出的统计量的控 制限。最终,融合的 BIC 统计量即为待测样本发 生故障的概率,如式 (10) 所示。 BICD2 = ∑B b=1 PD2 (xtest,b|F)PD2 (F|xtest,b) ∑B j=1 PD2 (xtest, j |F) (10) 1−α α 1−α BIC 统计量的控制限由 确定 (本文 取 0.01),当 BIC 的值大于 时,判断发生故障;否 则,过程正常。 当检测到故障后,需要找出引发故障的源变 量并对其进行分离。计算数据样本中各变量与其 第 4 期 郑静,等:基于互信息的多块 k 近邻故障监测及诊断 ·719·