正在加载图片...
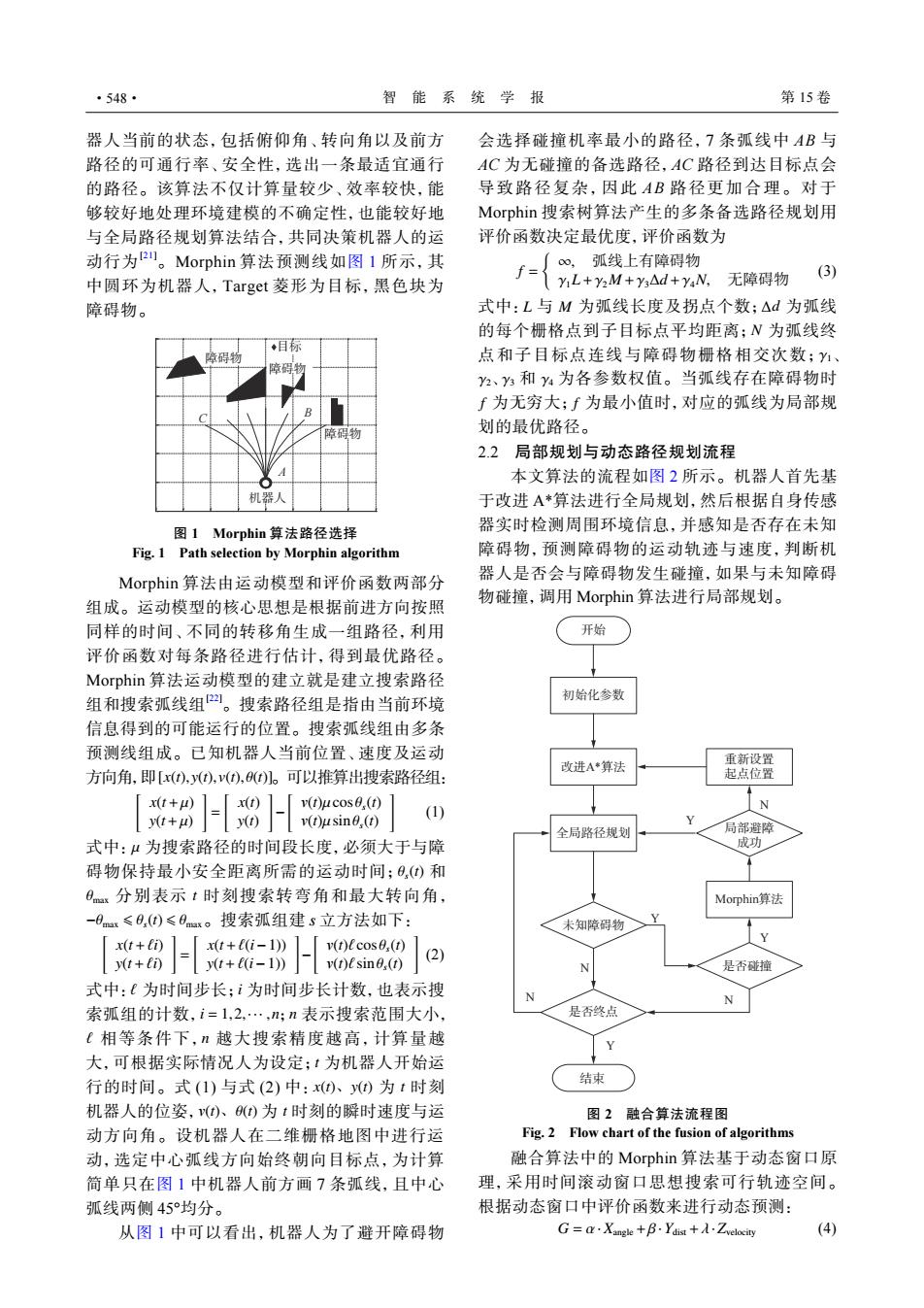
·548· 智能系统学报 第15卷 器人当前的状态,包括俯仰角、转向角以及前方 会选择碰撞机率最小的路径,7条弧线中AB与 路径的可通行率、安全性,选出一条最适宜通行 AC为无碰撞的备选路径,AC路径到达目标点会 的路径。该算法不仅计算量较少、效率较快,能 导致路径复杂,因此AB路径更加合理。对于 够较好地处理环境建模的不确定性,也能较好地 Morphin搜索树算法产生的多条备选路径规划用 与全局路径规划算法结合,共同决策机器人的运 评价函数决定最优度,评价函数为 动行为l。Morphin算法预测线如图1所示,其 了一{+预钱士有物无跨得物 (3) 中圆环为机器人,Target菱形为目标,黑色块为 障碍物。 式中:L与M为弧线长度及拐点个数;△d为弧线 的每个栅格点到子目标点平均距离:N为弧线终 章碍物 ◆目标 点和子目标点连线与障碍物栅格相交次数;y1、 障碍物 2、⅓和⅓为各参数权值。当弧线存在障碍物时 f为无穷大;∫为最小值时,对应的弧线为局部规 障碍物 划的最优路径。 2.2局部规划与动态路径规划流程 本文算法的流程如图2所示。机器人首先基 机器人 于改进A*算法进行全局规划,然后根据自身传感 图1 Morphin算法路径选择 器实时检测周围环境信息,并感知是否存在未知 Fig.1 Path selection by Morphin algorithm 障碍物,预测障碍物的运动轨迹与速度,判断机 Morphin算法由运动模型和评价函数两部分 器人是否会与障碍物发生碰撞,如果与未知障碍 组成。运动模型的核心思想是根据前进方向按照 物碰撞,调用Morphin算法进行局部规划。 同样的时间、不同的转移角生成一组路径,利用 开始 评价函数对每条路径进行估计,得到最优路径。 Morphin算法运动模型的建立就是建立搜索路径 组和搜索弧线组四。搜索路径组是指由当前环境 初始化参数 信息得到的可能运行的位置。搜索弧线组由多条 预测线组成。已知机器人当前位置、速度及运动 重新设置 改进A*算法 方向角,即[x(),y(①,v(0),()l。可以推算出搜索路径组: 起点位置 x(t+μ)x(t) v(t)μcos0,(t) t+四0 v(t)μsin0,(t) (1) N 全局路径规划 局部避障 式中:4为搜索路径的时间段长度,必须大于与障 成功 碍物保持最小安全距离所需的运动时间;O,()和 0x分别表示t时刻搜索转弯角和最大转向角, Morphin算法 -0x≤0,(t)≤0x。搜索弧组建s立方法如下: 未知障碍物 xt+的1 xt+i-1)】[ v(t)tcos0,(t) t+)= t+i-1》 v(t)tsin0,(t) (2) N 是否碰撞 式中:(为时间步长:i为时间步长计数,也表示搜 N 索弧组的计数,i=1,2,…,:n表示搜索范围大小, 是否终点 (相等条件下,n越大搜索精度越高,计算量越 大,可根据实际情况人为设定:1为机器人开始运 行的时间。式(1)与式(2)中:x()、y)为t时刻 结束 机器人的位姿,v()、)为t时刻的瞬时速度与运 图2融合算法流程图 动方向角。设机器人在二维栅格地图中进行运 Fig.2 Flow chart of the fusion of algorithms 动,选定中心弧线方向始终朝向目标点,为计算 融合算法中的Morphin算法基于动态窗口原 简单只在图1中机器人前方画7条弧线,且中心 理,采用时间滚动窗口思想搜索可行轨迹空间。 弧线两侧45均分。 根据动态窗口中评价函数来进行动态预测: 从图1中可以看出,机器人为了避开障碍物 G=aXamgle +B.Ydist +Zvelocity (4)器人当前的状态,包括俯仰角、转向角以及前方 路径的可通行率、安全性,选出一条最适宜通行 的路径。该算法不仅计算量较少、效率较快,能 够较好地处理环境建模的不确定性,也能较好地 与全局路径规划算法结合,共同决策机器人的运 动行为[21]。Morphin 算法预测线如图 1 所示,其 中圆环为机器人,Target 菱形为目标,黑色块为 障碍物。 A C B 障碍物 目标 障碍物 机器人 障碍物 图 1 Morphin 算法路径选择 Fig. 1 Path selection by Morphin algorithm [x(t), y(t), v(t), θ(t)] Morphin 算法由运动模型和评价函数两部分 组成。运动模型的核心思想是根据前进方向按照 同样的时间、不同的转移角生成一组路径,利用 评价函数对每条路径进行估计,得到最优路径。 Morphin 算法运动模型的建立就是建立搜索路径 组和搜索弧线组[22]。搜索路径组是指由当前环境 信息得到的可能运行的位置。搜索弧线组由多条 预测线组成。已知机器人当前位置、速度及运动 方向角,即 。可以推算出搜索路径组: [ x(t+µ) y(t+µ) ] = [ x(t) y(t) ] − [ v(t)µcos θs(t) v(t)µsinθs(t) ] (1) µ θs(t) θmax t −θmax ⩽ θs(t) ⩽ θmax 式中: 为搜索路径的时间段长度,必须大于与障 碍物保持最小安全距离所需的运动时间; 和 分别表示 时刻搜索转弯角和最大转向角, 。搜索弧组建 s 立方法如下: [ x(t+ℓi) y(t+ℓi) ] = [ x(t+ℓ(i−1)) y(t+ℓ(i−1)) ] − [ v(t)ℓ cos θs(t) v(t)ℓ sinθs(t) ] (2) ℓ i i = 1,2,··· ,n n ℓ n t x(t)、y(t) t v(t)、θ(t) t 式中: 为时间步长; 为时间步长计数,也表示搜 索弧组的计数, ; 表示搜索范围大小, 相等条件下, 越大搜索精度越高,计算量越 大,可根据实际情况人为设定; 为机器人开始运 行的时间。式 (1) 与式 (2) 中: 为 时刻 机器人的位姿, 为 时刻的瞬时速度与运 动方向角。设机器人在二维栅格地图中进行运 动,选定中心弧线方向始终朝向目标点,为计算 简单只在图 1 中机器人前方画 7 条弧线,且中心 弧线两侧 45°均分。 从图 1 中可以看出,机器人为了避开障碍物 会选择碰撞机率最小的路径,7 条弧线中 AB 与 AC 为无碰撞的备选路径,AC 路径到达目标点会 导致路径复杂,因此 AB 路径更加合理。对于 Morphin 搜索树算法产生的多条备选路径规划用 评价函数决定最优度,评价函数为 f = { ∞, 弧线上有障碍物 γ1L+γ2M +γ3∆d +γ4N, 无障碍物 (3) L M ∆d N γ1 γ2 γ3 γ4 f f 式中: 与 为弧线长度及拐点个数; 为弧线 的每个栅格点到子目标点平均距离; 为弧线终 点和子目标点连线与障碍物栅格相交次数; 、 、 和 为各参数权值。当弧线存在障碍物时 为无穷大; 为最小值时,对应的弧线为局部规 划的最优路径。 2.2 局部规划与动态路径规划流程 本文算法的流程如图 2 所示。机器人首先基 于改进 A*算法进行全局规划,然后根据自身传感 器实时检测周围环境信息,并感知是否存在未知 障碍物,预测障碍物的运动轨迹与速度,判断机 器人是否会与障碍物发生碰撞,如果与未知障碍 物碰撞,调用 Morphin 算法进行局部规划。 结束 N Y Y Y N N N Y 开始 初始化参数 改进A*算法 局部避障 成功 全局路径规划 未知障碍物 是否终点 是否碰撞 Morphin算法 重新设置 起点位置 图 2 融合算法流程图 Fig. 2 Flow chart of the fusion of algorithms 融合算法中的 Morphin 算法基于动态窗口原 理,采用时间滚动窗口思想搜索可行轨迹空间。 根据动态窗口中评价函数来进行动态预测: G = α· Xangle +β ·Ydist +λ ·Zvelocity (4) ·548· 智 能 系 统 学 报 第 15 卷