正在加载图片...
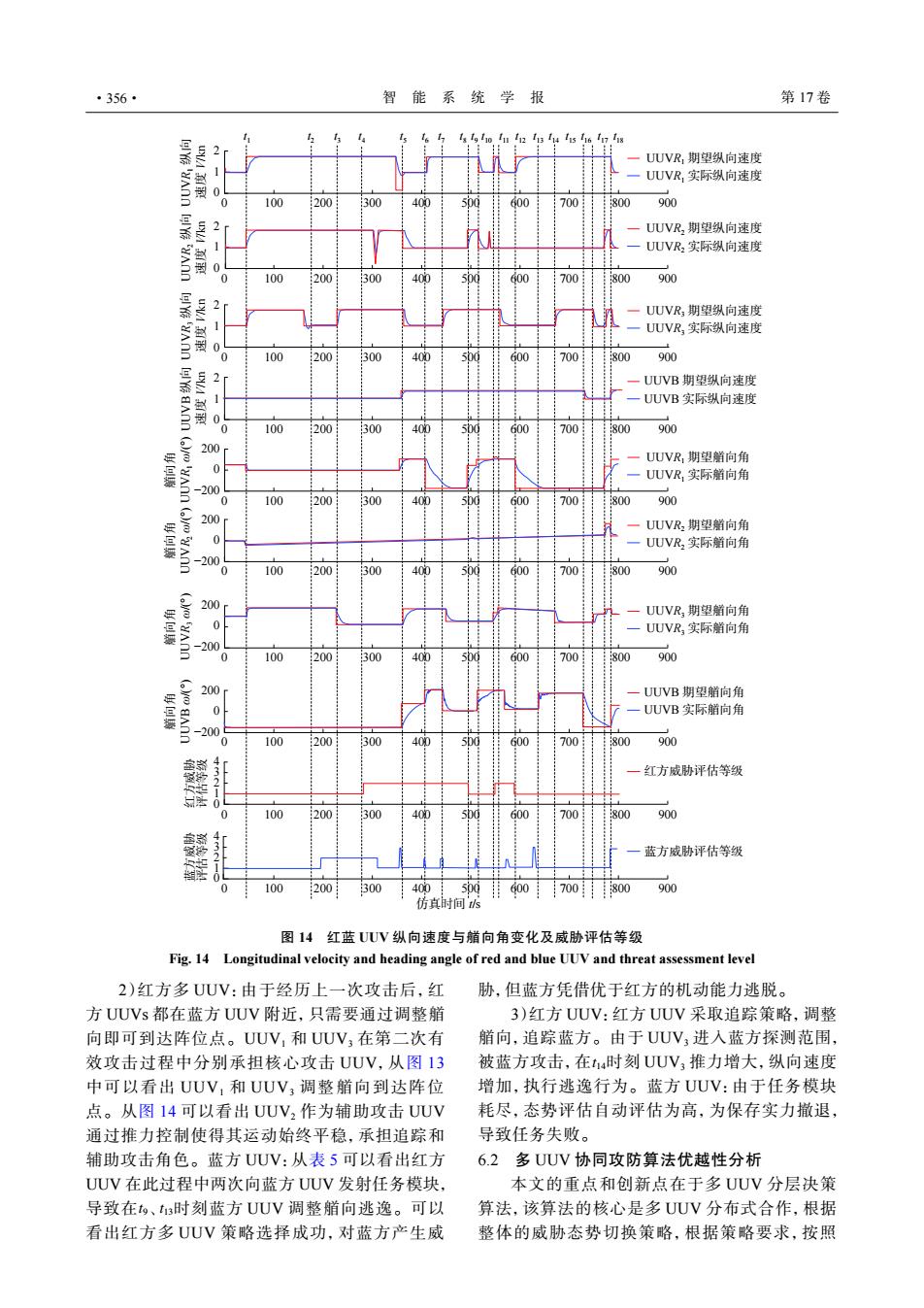
·356· 智能系统学报 第17卷 2 一UUVR,期望纵向速度 一UUVR,实际纵向速度 100 200 300 400 500 600 700 800 900 UUVR,期望纵向速度 UUVR2实际纵向速度 0 100 200 300 400 500 600 700 800 900 2 一UUVR,期望纵向速度 1 一UUVR,实际纵向速度 100 200 300 400 5t0 600 700 800 900 2 UUVB期望纵向速度 1 一UUVB实际纵向速度 100 200 300 40 500 600 700 300 900 200 UUVR,期望艏向角 UUVR,实际艏向角 200 100 200 300 40D 600 700 800 900 200 一UUVR2期望向角 0 一UUVR2实际艏向角 -200 100 200 300 40 500 600 700 800 900 200 UUVR,期望艏向角 0 一UUVR,实际艏向角 200 100 200 300 400 50 600 700 800 900 200 UUVB期望艏向角 0 一UUVB实际艏向角 200 100 200 300 400 5D0 600 700 800 900 321 红方威胁评估等级 100 200 300 400 600 700 800 900 4321 蓝方威胁评估等级 100 200 300 400 500400700800 900 仿真时间s 图14红蓝UUV纵向速度与艏向角变化及威胁评估等级 Fig.14 Longitudinal velocity and heading angle of red and blue UUV and threat assessment level 2)红方多UUV:由于经历上一次攻击后,红 胁,但蓝方凭借优于红方的机动能力逃脱。 方UUVs都在蓝方UUV附近,只需要通过调整艏 3)红方UUV:红方UUV采取追踪策略,调整 向即可到达阵位点。UUV,和UUV,在第二次有 艏向,追踪蓝方。由于UUV,进人蓝方探测范围, 效攻击过程中分别承担核心攻击UUV,从图13 被蓝方攻击,在t4时刻UUV,推力增大,纵向速度 中可以看出UUV,和UUV;调整艏向到达阵位 增加,执行逃逸行为。蓝方UUV:由于任务模块 点。从图14可以看出UUV2作为辅助攻击UUV 耗尽,态势评估自动评估为高,为保存实力撤退, 通过推力控制使得其运动始终平稳,承担追踪和 导致任务失败。 辅助攻击角色。蓝方UUV:从表5可以看出红方 6.2多UUV协同攻防算法优越性分析 UUV在此过程中两次向蓝方UUV发射任务模块, 本文的重点和创新点在于多UUV分层决策 导致在t、t时刻蓝方UUV调整艏向逃逸。可以 算法,该算法的核心是多UUV分布式合作,根据 看出红方多UUV策略选择成功,对蓝方产生威 整体的威胁态势切换策略,根据策略要求,按照0 1 2 0 1 2 0 1 2 0 1 2 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 900 t1 t2 t3 t4 t5 t6 t7 t8 t9 t10 t11 t12 t13 t14 t15 t16 t17 t18 UUVR1 期望纵向速度 UUVR1 实际纵向速度 UUVR1 纵向 速度 V/kn UUVR2 纵向 速度 V/kn UUVR3 纵向 速度 V/kn UUVB 纵向 速度 V/kn 艏向角 UUVR1 ω/(°) 艏向角 UUVR2 ω/(°) 艏向角 UUVR3 ω/(°) 艏向角 UUVB ω/(°) 仿真时间 t/s UUVR1 期望艏向角 UUVR1 实际艏向角 UUVR2 期望艏向角 UUVR2 实际艏向角 UUVR3 期望艏向角 UUVR3 实际艏向角 UUVB 期望艏向角 UUVB 实际艏向角 红方威胁评估等级 蓝方威胁评估等级 UUVR2 期望纵向速度 UUVR2 实际纵向速度 UUVR3 期望纵向速度 UUVR3 实际纵向速度 UUVB 期望纵向速度 UUVB 实际纵向速度 −200 0 200 −200 0 200 −200 0 200 −200 0 200 0 1 2 3 4 0 1 2 3 4 红方威胁 评估等级 蓝方威胁 评估等级 图 14 红蓝 UUV 纵向速度与艏向角变化及威胁评估等级 Fig. 14 Longitudinal velocity and heading angle of red and blue UUV and threat assessment level t9 t13 2)红方多 UUV:由于经历上一次攻击后,红 方 UUVs 都在蓝方 UUV 附近,只需要通过调整艏 向即可到达阵位点。UUV1 和 UUV3 在第二次有 效攻击过程中分别承担核心攻击 UUV,从图 13 中可以看出 UUV1 和 UUV3 调整艏向到达阵位 点。从图 14 可以看出 UUV2 作为辅助攻击 UUV 通过推力控制使得其运动始终平稳,承担追踪和 辅助攻击角色。蓝方 UUV:从表 5 可以看出红方 UUV 在此过程中两次向蓝方 UUV 发射任务模块, 导致在 、 时刻蓝方 UUV 调整艏向逃逸。可以 看出红方多 UUV 策略选择成功,对蓝方产生威 胁,但蓝方凭借优于红方的机动能力逃脱。 t14 3)红方 UUV:红方 UUV 采取追踪策略,调整 艏向,追踪蓝方。由于 UUV3 进入蓝方探测范围, 被蓝方攻击,在 时刻 UUV3 推力增大,纵向速度 增加,执行逃逸行为。蓝方 UUV:由于任务模块 耗尽,态势评估自动评估为高,为保存实力撤退, 导致任务失败。 6.2 多 UUV 协同攻防算法优越性分析 本文的重点和创新点在于多 UUV 分层决策 算法,该算法的核心是多 UUV 分布式合作,根据 整体的威胁态势切换策略,根据策略要求,按照 ·356· 智 能 系 统 学 报 第 17 卷