正在加载图片...
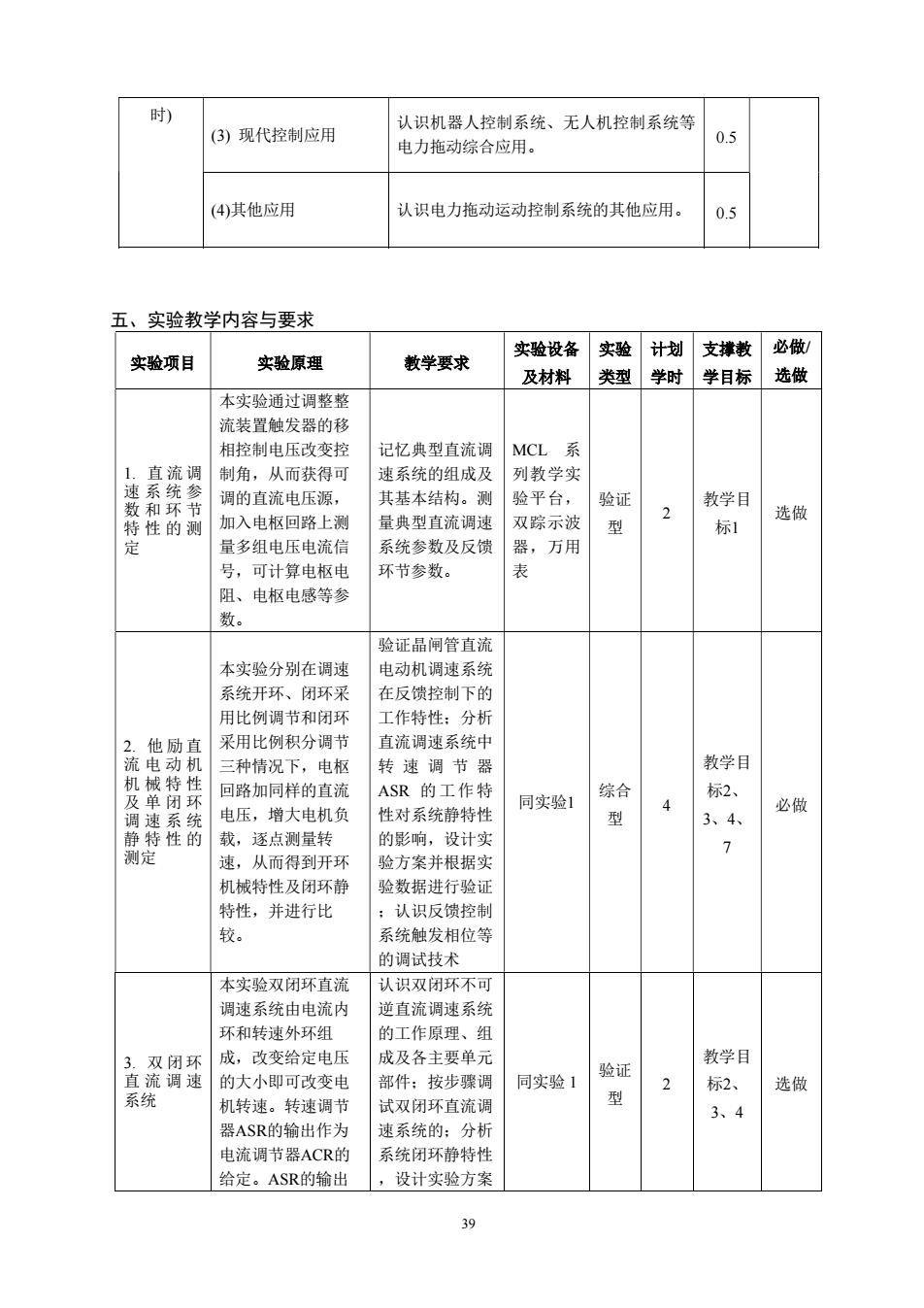
时) 认识机器人控制系统、无人机控制系统等 (3③)现代控制应用 电力拖动综合应用。 (4)其他应用 认识电力拖动运动控制系统的其他应用。 0.5 五、实验教学内容与要求 实验设备实验计划支撑教必做/ 实验项目 实验原理 散学要求 及材料 类型学时学目标 选做 本实验通过调整整 流装置触发器的移 相控制电压改变控 记忆典型直流调 MCL 系 直流调 制角 从而获得可 速系统的组 列教学实 调的直流电压源, 其基本结构。测 验平台, 验证 2 教学目 加入电枢回路上测 量典型直流调速 双踪示波 选做 标1 量多组电压电流信 系统参数及反馈器,万用 号,可计算电枢电 不节参数 且 电枢电感等 数。 验证品闸管直流 本实验分别在调速 电动机调速系统 系统开环、闭环采 在反馈控制下的 用比例调节和 工作特性 分村 2.他励直 采用比例积分调节 直流调速系统中 三种情况下,电权 转速调节器 教学 单闭 回路加同样的直流 ASR的工作特 综合 标2、 同实验1 申压,增大申机伤 性对系经静特性 4 必做 速系统 的 型 34 点测量转 设计实 7 从 得到开王 案并根据 机械特性及闭环静 验数据进行验证 特性,并进行比 :认识反遗控 较。 系统触发相位等 的调试转术 本实验双闭环直清 认识双闭环不可 调速系统由电流内 逆直流调速系统 环和转速外环组 的工作原理、组 成,改变给定电压 成及各主要单元 教学目 哈证 的大小即可改由 部件:按步隳调 同实验1 2 标2、 选做 系统 机转速 转速调 试双闭环直流调 型 3、4 器ASR的输出作 速系统的:分析 电流调节器ACR的 系统闭环静特性 给定。ASR的输出 ,设计实验方案 39 39 时) (3) 现代控制应用 认识机器人控制系统、无人机控制系统等 电力拖动综合应用。 0.5 (4)其他应用 认识电力拖动运动控制系统的其他应用。 0.5 五、实验教学内容与要求 实验项目 实验原理 教学要求 实验设备 及材料 实验 类型 计划 学时 支撑教 学目标 必做/ 选做 1. 直 流 调 速 系 统 参 数 和 环 节 特 性 的 测 定 本实验通过调整整 流装置触发器的移 相控制电压改变控 制角,从而获得可 调的直流电压源, 加入电枢回路上测 量多组电压电流信 号,可计算电枢电 阻、电枢电感等参 数。 记忆典型直流调 速系统的组成及 其基本结构。测 量典型直流调速 系统参数及反馈 环节参数。 MCL 系 列教学实 验平台, 双踪示波 器,万用 表 验证 型 2 教学目 标1 选做 2. 他 励 直 流 电 动 机 机 械 特 性 及 单 闭 环 调 速 系 统 静 特 性 的 测定 本实验分别在调速 系统开环、闭环采 用比例调节和闭环 采用比例积分调节 三种情况下,电枢 回路加同样的直流 电压,增大电机负 载,逐点测量转 速,从而得到开环 机械特性及闭环静 特性,并进行比 较。 验证晶闸管直流 电动机调速系统 在反馈控制下的 工作特性;分析 直流调速系统中 转 速 调 节 器 ASR 的工作特 性对系统静特性 的影响,设计实 验方案并根据实 验数据进行验证 ;认识反馈控制 系统触发相位等 的调试技术 同实验1 综合 型 4 教学目 标2、 3、4、 7 必做 3. 双 闭 环 直 流 调 速 系统 本实验双闭环直流 调速系统由电流内 环和转速外环组 成,改变给定电压 的大小即可改变电 机转速。转速调节 器ASR的输出作为 电流调节器ACR的 给定。ASR的输出 认识双闭环不可 逆直流调速系统 的工作原理、组 成及各主要单元 部件;按步骤调 试双闭环直流调 速系统的;分析 系统闭环静特性 ,设计实验方案 同实验 1 验证 型 2 教学目 标2、 3、4 选做