正在加载图片...
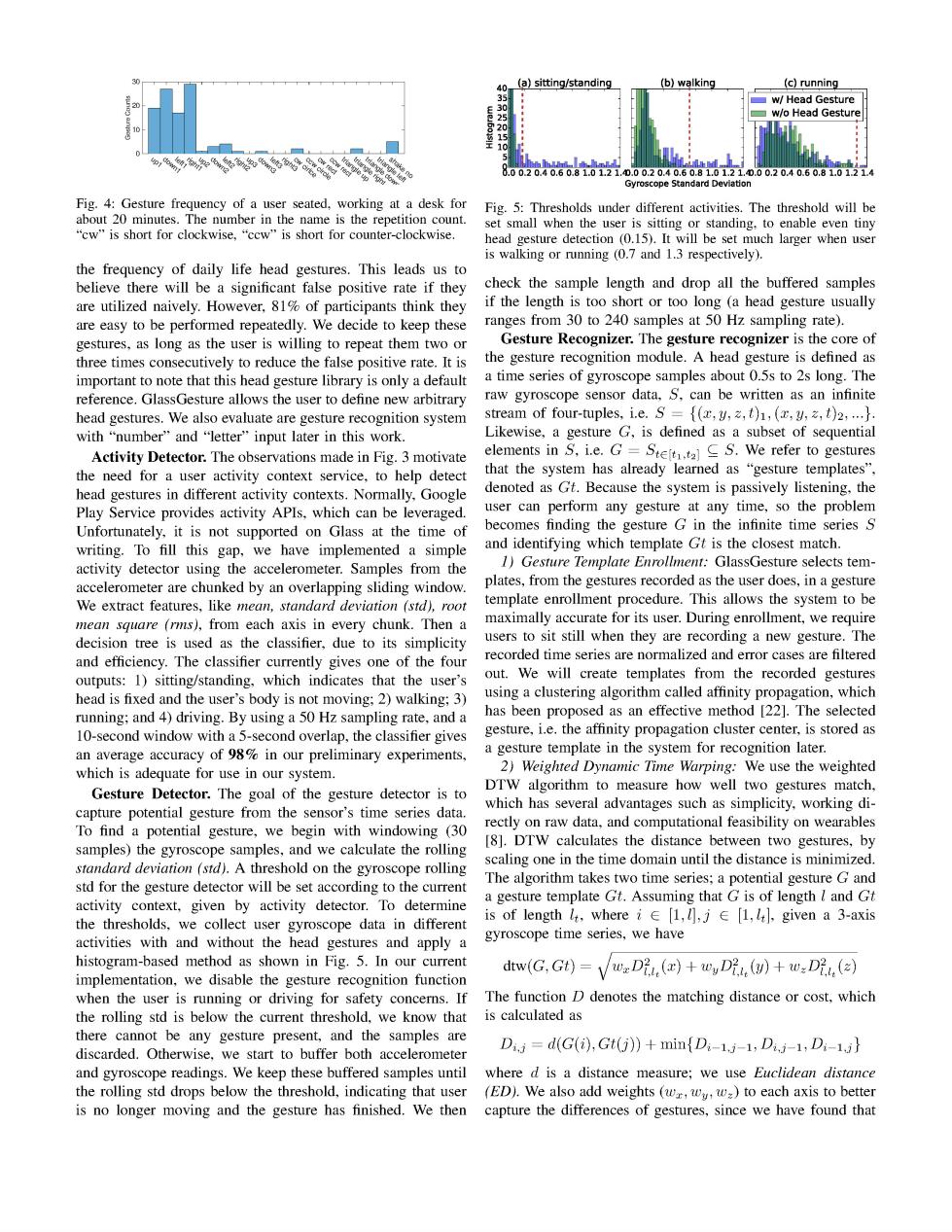
(a)sitting/standing (b)walking (c)running 35 w/Head Gesture w/o Head Gesture 820 8.002040608102 00.2040.60.81.021,0.00.20.40.60.81.0121 Gyroscope Standard Deviaton Fig.4:Gesture frequency of a user seated,working at a desk for Fig.5:Thresholds under different activities.The threshold will be about 20 minutes.The number in the name is the repetition count. set small when the user is sitting or standing,to enable even tiny "cw"is short for clockwise."ccw"is short for counter-clockwise. head gesture detection (0.15).It will be set much larger when user is walking or running (0.7 and 1.3 respectively). the frequency of daily life head gestures.This leads us to believe there will be a significant false positive rate if they check the sample length and drop all the buffered samples are utilized naively.However,81%of participants think they if the length is too short or too long (a head gesture usually are easy to be performed repeatedly.We decide to keep these ranges from 30 to 240 samples at 50 Hz sampling rate). gestures,as long as the user is willing to repeat them two or Gesture Recognizer.The gesture recognizer is the core of three times consecutively to reduce the false positive rate.It is the gesture recognition module.A head gesture is defined as important to note that this head gesture library is only a default a time series of gyroscope samples about 0.5s to 2s long.The reference.GlassGesture allows the user to define new arbitrary raw gyroscope sensor data.S,can be written as an infinite head gestures.We also evaluate are gesture recognition system stream of four-tuples,i.e.S=(,y,,)1,(y,z,)2,.... with "number"and "letter"input later in this work. Likewise,a gesture G,is defined as a subset of sequential Activity Detector.The observations made in Fig.3 motivate elements in S.i.e.G-StttS.We refer to gestures the need for a user activity context service,to help detect that the system has already learned as "gesture templates". head gestures in different activity contexts.Normally,Google denoted as Gt.Because the system is passively listening,the Play Service provides activity APls,which can be leveraged. user can perform any gesture at any time,so the problem Unfortunately,it is not supported on Glass at the time of becomes finding the gesture G in the infinite time series S writing.To fill this gap,we have implemented a simple and identifying which template Gt is the closest match. activity detector using the accelerometer.Samples from the 1)Gesture Template Enrollment:GlassGesture selects tem- accelerometer are chunked by an overlapping sliding window. plates,from the gestures recorded as the user does,in a gesture We extract features,like mean,standard deviation (std),root template enrollment procedure.This allows the system to be mean square (rms),from each axis in every chunk.Then a maximally accurate for its user.During enrollment,we require decision tree is used as the classifier,due to its simplicity users to sit still when they are recording a new gesture.The and efficiency.The classifier currently gives one of the four recorded time series are normalized and error cases are filtered outputs:1)sitting/standing,which indicates that the user's out.We will create templates from the recorded gestures head is fixed and the user's body is not moving;2)walking;3) using a clustering algorithm called affinity propagation,which running;and 4)driving.By using a 50 Hz sampling rate,and a has been proposed as an effective method [22].The selected 10-second window with a 5-second overlap,the classifier gives gesture,i.e.the affinity propagation cluster center,is stored as an average accuracy of 98%in our preliminary experiments, a gesture template in the system for recognition later. which is adequate for use in our system. 2)Weighted Dynamic Time Warping:We use the weighted Gesture Detector.The goal of the gesture detector is to DTW algorithm to measure how well two gestures match, capture potential gesture from the sensor's time series data. which has several advantages such as simplicity,working di- rectly on raw data,and computational feasibility on wearables To find a potential gesture,we begin with windowing (30 8].DTW calculates the distance between two gestures,by samples)the gyroscope samples,and we calculate the rolling standard deviation (std).A threshold on the gyroscope rolling scaling one in the time domain until the distance is minimized. The algorithm takes two time series;a potential gesture G and std for the gesture detector will be set according to the current activity context,given by activity detector.To determine a gesture template Gt.Assuming that G is of length I and Gt the thresholds,we collect user gyroscope data in different is of length 4t,where i [1,],j[1,]given a 3-axis activities with and without the head gestures and apply a gyroscope time series,we have histogram-based method as shown in Fig.5.In our current implementation,we disable the gesture recognition function dtw(G,Gt)=VxDi,(r)+uDi.()+wzDi.(z) when the user is running or driving for safety concerns.If The function D denotes the matching distance or cost,which the rolling std is below the current threshold,we know that is calculated as there cannot be any gesture present,and the samples are discarded.Otherwise,we start to buffer both accelerometer Dii=d(G(i),Gt(j))+min{Di-1.j-1;Di.j-1;Di-1.} and gyroscope readings.We keep these buffered samples until where d is a distance measure;we use Euclidean distance the rolling std drops below the threshold,indicating that user (ED).We also add weights (w,w,w)to each axis to better is no longer moving and the gesture has finished.We then capture the differences of gestures,since we have found that