正在加载图片...
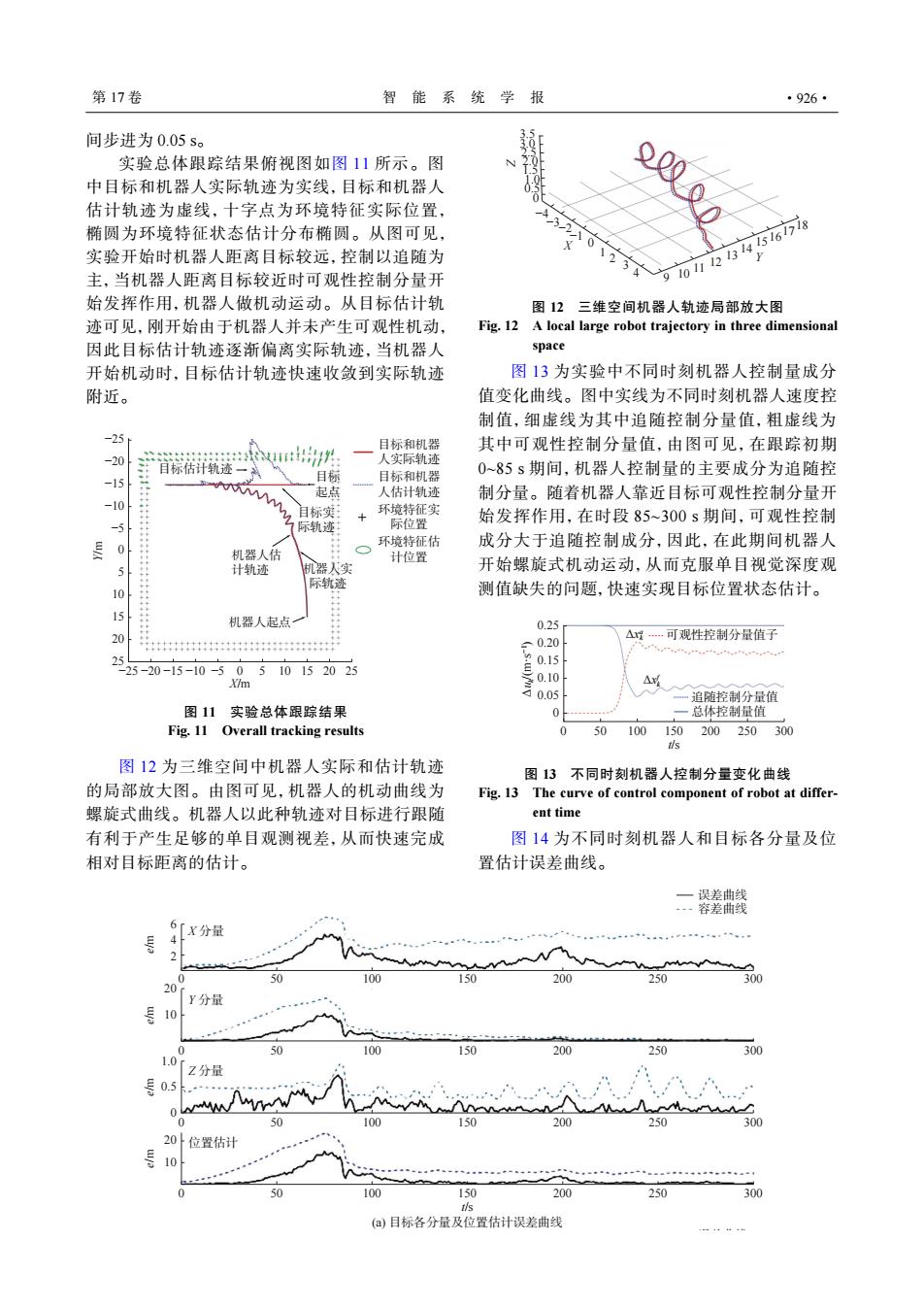
第17卷 智能系统学报 ·926· 间步进为0.05s。 实验总体跟踪结果俯视图如图11所示。图 中目标和机器人实际轨迹为实线,目标和机器人 估计轨迹为虚线,十字点为环境特征实际位置, 椭圆为环境特征状态估计分布椭圆。从图可见, 实验开始时机器人距离目标较远,控制以追随为 主,当机器人距离目标较近时可观性控制分量开 12 91012314516178 始发挥作用,机器人做机动运动。从目标估计轨 图12三维空间机器人轨迹局部放大图 迹可见,刚开始由于机器人并未产生可观性机动, Fig.12 A local large robot trajectory in three dimensional 因此目标估计轨迹逐渐偏离实际轨迹,当机器人 space 开始机动时,目标估计轨迹快速收敛到实际轨迹 图13为实验中不同时刻机器人控制量成分 附近。 值变化曲线。图中实线为不同时刻机器人速度控 制值,细虚线为其中追随控制分量值,粗虚线为 -25 目标和机器 其中可观性控制分量值,由图可见,在跟踪初期 -20 人实际轨迹 目标估计轨迹一 0~85s期间,机器人控制量的主要成分为追随控 -15 目标 目标和机器 起点 人估计轨迹 制分量。随着机器人靠近目标可观性控制分量开 -10 目标实 环境特征实 -5 际轨迹 际位置 始发挥作用,在时段85~300s期间,可观性控制 环境特征估 成分大于追随控制成分,因此,在此期间机器人 0 机器人估 计位置 计轨迹 机器人实 开始螺旋式机动运动,从而克服单目视觉深度观 际轨迹 10 测值缺失的问题,快速实现目标位置状态估计。 15 ++ 机器人起点 0.25 分020 △可观性控制分量值子 -25-20-15-10-50510152025 m 追随控制分量值 图11实验总体跟踪结果 0 总体控制量值 Fig.11 Overall tracking results 0 50 100150200250300 s 图12为三维空间中机器人实际和估计轨迹 图13不同时刻机器人控制分量变化曲线 的局部放大图。由图可见,机器人的机动曲线为 Fig.13 The curve of control component of robot at differ- 螺旋式曲线。机器人以此种轨迹对目标进行跟随 ent time 有利于产生足够的单目观测视差,从而快速完成 图14为不同时刻机器人和目标各分量及位 相对目标距离的估计。 置估计误差曲线。 一误差曲线 容差曲线 6[X分量 50 100 150 200 250 300 20 了分量 号10 50 100 150 200 250 300 1.0 Z分量 号0.5 0 A 50 100 150 200 250 300 20位置估计 10 50 100 150 200 250 300 (a)目标各分量及位置估计误差曲线间步进为 0.05 s。 实验总体跟踪结果俯视图如图 11 所示。图 中目标和机器人实际轨迹为实线,目标和机器人 估计轨迹为虚线,十字点为环境特征实际位置, 椭圆为环境特征状态估计分布椭圆。从图可见, 实验开始时机器人距离目标较远,控制以追随为 主,当机器人距离目标较近时可观性控制分量开 始发挥作用,机器人做机动运动。从目标估计轨 迹可见,刚开始由于机器人并未产生可观性机动, 因此目标估计轨迹逐渐偏离实际轨迹,当机器人 开始机动时,目标估计轨迹快速收敛到实际轨迹 附近。 目标和机器 人实际轨迹 目标和机器 人估计轨迹 环境特征实 际位置 环境特征估 计位置 机器人起点 目标 起点 目标实 际轨迹 目标估计轨迹 机器人实 际轨迹 机器人估 计轨迹 −25 −20 −15 −10 −5 0 5 10 15 20 Y/m X/m 25 −25 −20 −15 −10 −5 0 5 10 15 20 25 图 11 实验总体跟踪结果 Fig. 11 Overall tracking results 图 12 为三维空间中机器人实际和估计轨迹 的局部放大图。由图可见,机器人的机动曲线为 螺旋式曲线。机器人以此种轨迹对目标进行跟随 有利于产生足够的单目观测视差,从而快速完成 相对目标距离的估计。 3.5 3.0 2.5 2.0 1.5 1.0 0.5 Z 0 −4−3−2−1 X Y 0 1 2 3 4 9 10 11 12 13 14 15161718 图 12 三维空间机器人轨迹局部放大图 Fig. 12 A local large robot trajectory in three dimensional space 图 13 为实验中不同时刻机器人控制量成分 值变化曲线。图中实线为不同时刻机器人速度控 制值,细虚线为其中追随控制分量值,粗虚线为 其中可观性控制分量值,由图可见,在跟踪初期 0~85 s 期间,机器人控制量的主要成分为追随控 制分量。随着机器人靠近目标可观性控制分量开 始发挥作用,在时段 85~300 s 期间,可观性控制 成分大于追随控制成分,因此,在此期间机器人 开始螺旋式机动运动,从而克服单目视觉深度观 测值缺失的问题,快速实现目标位置状态估计。 0 0.25 0.20 0.15 0.10 0.05 0 50 100 150 Δx a k Δx f k t/s Δuk/(m·s−1 ) 200 250 300 可观性控制分量值子 追随控制分量值 总体控制量值 图 13 不同时刻机器人控制分量变化曲线 Fig. 13 The curve of control component of robot at different time 图 14 为不同时刻机器人和目标各分量及位 置估计误差曲线。 0 50 100 150 200 250 300 0 50 100 150 200 250 300 0 50 100 150 200 250 300 0 50 100 150 t/s t/s 200 250 300 0 0.5 1.0 10 20 10 20 6 X 分量 误差曲线 容差曲线 X 分量 Y 分量 Y 分量 Z 分量 Z 分量 位置估计 位置估计 4 e/m e/m e/m e/m e/m e/m e/m e/m 2 (a) 目标各分量及位置估计误差曲线 (b) 机器人各分量及位置估计误差曲线 误差曲线 容差曲线 第 17 卷 智 能 系 统 学 报 ·926·