正在加载图片...
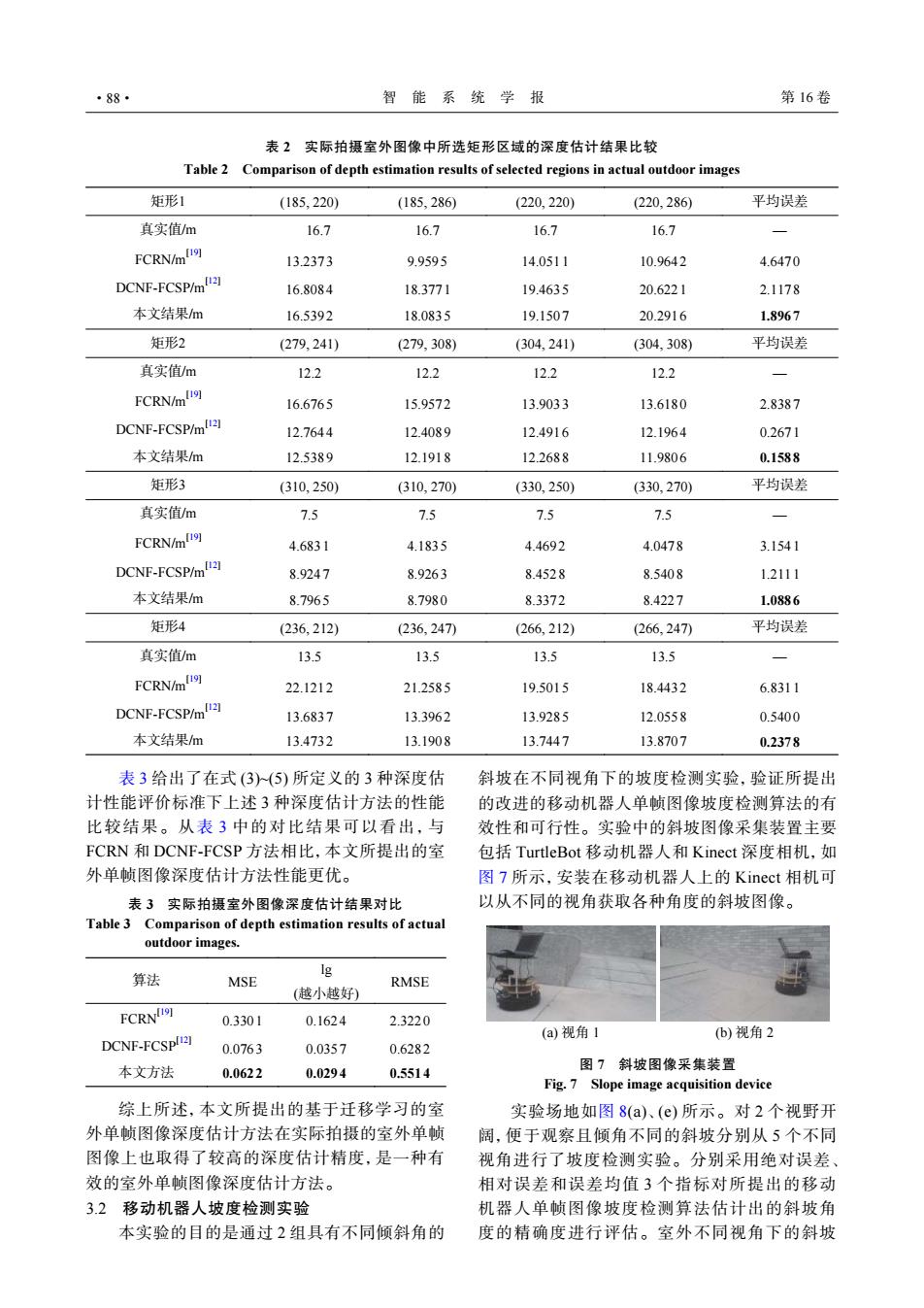
·88 智能系统学报 第16卷 表2实际拍摄室外图像中所选矩形区域的深度估计结果比较 Table 2 Comparison of depth estimation results of selected regions in actual outdoor images 矩形1 (185,220) (185,286) (220,220) (220,286) 平均误差 真实值m 16.7 16.7 16.7 16.7 FCRN/m 13.2373 9.9595 14.0511 10.9642 4.6470 DCNF-FCSP/m2 16.8084 18.3771 19.4635 20.6221 2.1178 本文结果m 16.5392 18.0835 19.1507 20.2916 1.8967 矩形2 (279,241) (279,308) (304,241) (304,308) 平均误差 真实值/m 12.2 12.2 12.2 12.2 FCRN/m 16.6765 15.9572 13.9033 13.6180 2.8387 DCNF-FCSP/m2] 12.7644 12.4089 12.4916 12.1964 0.2671 本文结果/m 12.5389 12.1918 12.2688 11.9806 0.1588 矩形3 (310,250) (310,270) (330,250) (330,270) 平均误差 真实值m 7.5 7.5 7.5 7.5 FCRN/m 4.6831 4.1835 4.4692 4.0478 3.1541 DCNF-FCSP/m2 8.9247 8.9263 8.4528 8.5408 1.2111 本文结果/m 8.7965 8.7980 83372 8.4227 1.0886 矩形4 (236,212) (236,247) (266,212) (266,247 平均误羞 真实值/m 13.5 13.5 13.5 13.5 FCRN/m 22.1212 21.2585 19.5015 18.4432 6.8311 DCNF-FCSP/m2 13.6837 13.3962 13.9285 12.0558 0.5400 本文结果/m 13.4732 13.1908 13.7447 13.8707 0.2378 表3给出了在式(3)(5)所定义的3种深度估 斜坡在不同视角下的坡度检测实验,验证所提出 计性能评价标准下上述3种深度估计方法的性能 的改进的移动机器人单帧图像坡度检测算法的有 比较结果。从表3中的对比结果可以看出,与 效性和可行性。实验中的斜坡图像采集装置主要 FCRN和DCNF-FCSP方法相比,本文所提出的室 包括TurtleBot移动机器人和Kinect深度相机,如 外单帧图像深度估计方法性能更优。 图7所示,安装在移动机器人上的Kinect相机可 表3实际拍摄室外图像深度估计结果对比 以从不同的视角获取各种角度的斜坡图像。 Table 3 Comparison of depth estimation results of actual outdoor images. 算法 农 MSE RMSE (越小越好) FCRNI9T 0.3301 0.1624 2.3220 DCNF-FCSPI12] (a)视角1 b)视角2 0.0763 0.0357 0.6282 本文方法 图7斜坡图像采集装置 0.0622 0.0294 0.5514 Fig.7 Slope image acquisition device 综上所述,本文所提出的基于迁移学习的室 实验场地如图8(a)、(e)所示。对2个视野开 外单帧图像深度估计方法在实际拍摄的室外单帧 阔,便于观察且倾角不同的斜坡分别从5个不同 图像上也取得了较高的深度估计精度,是一种有 视角进行了坡度检测实验。分别采用绝对误差、 效的室外单帧图像深度估计方法。 相对误差和误差均值3个指标对所提出的移动 3.2移动机器人坡度检测实验 机器人单帧图像坡度检测算法估计出的斜坡角 本实验的目的是通过2组具有不同倾斜角的 度的精确度进行评估。室外不同视角下的斜坡表 2 实际拍摄室外图像中所选矩形区域的深度估计结果比较 Table 2 Comparison of depth estimation results of selected regions in actual outdoor images 矩形1 (185, 220) (185, 286) (220, 220) (220, 286) 平均误差 真实值/m 16.7 16.7 16.7 16.7 — FCRN/m[19] 13.2373 9.9595 14.0511 10.964 2 4.6470 DCNF-FCSP/m[12] 16.8084 18.3771 19.4635 20.622 1 2.1178 本文结果/m 16.5392 18.0835 19.1507 20.291 6 1.8967 矩形2 (279, 241) (279, 308) (304, 241) (304, 308) 平均误差 真实值/m 12.2 12.2 12.2 12.2 — FCRN/m[19] 16.6765 15.9572 13.9033 13.618 0 2.8387 DCNF-FCSP/m[12] 12.7644 12.4089 12.4916 12.196 4 0.2671 本文结果/m 12.5389 12.1918 12.2688 11.980 6 0.1588 矩形3 (310, 250) (310, 270) (330, 250) (330, 270) 平均误差 真实值/m 7.5 7.5 7.5 7.5 — FCRN/m[19] 4.6831 4.1835 4.4692 4.047 8 3.1541 DCNF-FCSP/m[12] 8.9247 8.9263 8.4528 8.540 8 1.2111 本文结果/m 8.7965 8.7980 8.3372 8.422 7 1.0886 矩形4 (236, 212) (236, 247) (266, 212) (266, 247) 平均误差 真实值/m 13.5 13.5 13.5 13.5 — FCRN/m[19] 22.1212 21.2585 19.5015 18.443 2 6.8311 DCNF-FCSP/m[12] 13.6837 13.3962 13.9285 12.055 8 0.5400 本文结果/m 13.4732 13.1908 13.7447 13.870 7 0.2378 表 3 给出了在式 (3)~(5) 所定义的 3 种深度估 计性能评价标准下上述 3 种深度估计方法的性能 比较结果。从表 3 中的对比结果可以看出,与 FCRN 和 DCNF-FCSP 方法相比,本文所提出的室 外单帧图像深度估计方法性能更优。 表 3 实际拍摄室外图像深度估计结果对比 Table 3 Comparison of depth estimation results of actual outdoor images. 算法 MSE lg (越小越好) RMSE FCRN[19] 0.330 1 0.162 4 2.3220 DCNF-FCSP[12] 0.076 3 0.035 7 0.6282 本文方法 0.062 2 0.029 4 0.5514 综上所述,本文所提出的基于迁移学习的室 外单帧图像深度估计方法在实际拍摄的室外单帧 图像上也取得了较高的深度估计精度,是一种有 效的室外单帧图像深度估计方法。 3.2 移动机器人坡度检测实验 本实验的目的是通过 2 组具有不同倾斜角的 斜坡在不同视角下的坡度检测实验,验证所提出 的改进的移动机器人单帧图像坡度检测算法的有 效性和可行性。实验中的斜坡图像采集装置主要 包括 TurtleBot 移动机器人和 Kinect 深度相机,如 图 7 所示,安装在移动机器人上的 Kinect 相机可 以从不同的视角获取各种角度的斜坡图像。 (a) 视角 1 (b) 视角 2 图 7 斜坡图像采集装置 Fig. 7 Slope image acquisition device 实验场地如图 8(a)、(e) 所示。对 2 个视野开 阔,便于观察且倾角不同的斜坡分别从 5 个不同 视角进行了坡度检测实验。分别采用绝对误差、 相对误差和误差均值 3 个指标对所提出的移动 机器人单帧图像坡度检测算法估计出的斜坡角 度的精确度进行评估。室外不同视角下的斜坡 ·88· 智 能 系 统 学 报 第 16 卷