正在加载图片...
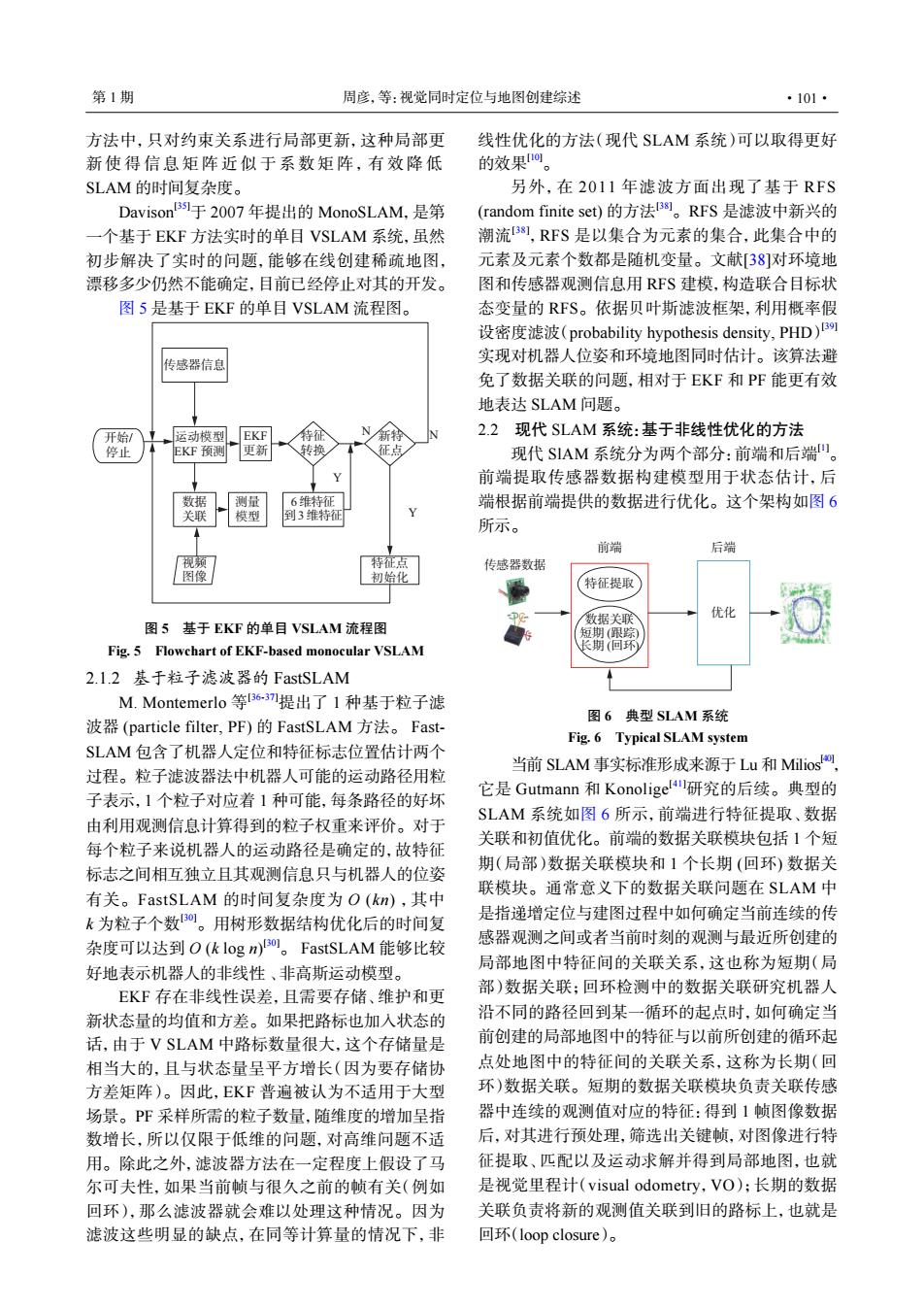
第1期 周彦,等:视觉同时定位与地图创建综述 ·101· 方法中,只对约束关系进行局部更新,这种局部更 线性优化的方法(现代SLAM系统)可以取得更好 新使得信息矩阵近似于系数矩阵,有效降低 的效果1o SLAM的时间复杂度。 另外,在2011年滤波方面出现了基于RFS Davisonl3s于2007年提出的MonoSLAM,是第 (random finite set)的方法B。RFS是滤波中新兴的 一个基于EKF方法实时的单目VSLAM系统,虽然 潮流B8),RFS是以集合为元素的集合,此集合中的 初步解决了实时的问题,能够在线创建稀疏地图, 元素及元素个数都是随机变量。文献38]对环境地 漂移多少仍然不能确定,目前已经停止对其的开发。 图和传感器观测信息用RFS建模,构造联合目标状 图S是基于EKF的单目VSLAM流程图。 态变量的RFS。依据贝叶斯滤波框架,利用概率假 设密度滤波(probability hypothesis density,.PHD)B9 传感器信息 实现对机器人位姿和环境地图同时估计。该算法避 免了数据关联的问题,相对于EKF和P℉能更有效 地表达SLAM问题。 开始/ 运动模型 EKF 待征 新特 2.2现代SLAM系统:基于非线性优化的方法 EKF预测 更新 转换 征点 现代S1AM系统分为两个部分:前端和后端。 前端提取传感器数据构建模型用于状态估计,后 数据 测量 6维特征 端根据前端提供的数据进行优化。这个架构如图6 关联 模型 到3维特征 所示。 前端 后端 视 特征点 传感器数据 图像 初始化 特征提取 致据关联 优化 图5基于EKF的单目VSLAM流程图 短期(跟踪 Fig.5 Flowchart of EKF-based monocular VSLAM 长期(回环 2.1.2基于粒子滤波器的FastSLAM M.Montemerlo等B6-3提出了1种基于粒子滤 波器(particle filter,PF)的FastSLAM方法。Fast- 图6典型SLAM系统 Fig.6 Typical SLAM system SLAM包含了机器人定位和特征标志位置估计两个 当前SLAM事实标准形成来源于Lu和Milios 过程。粒子滤波器法中机器人可能的运动路径用粒 它是Gutmann和Konoligel研究的后续。典型的 子表示,1个粒子对应着1种可能,每条路径的好坏 SLAM系统如图6所示,前端进行特征提取、数据 由利用观测信息计算得到的粒子权重来评价。对于 关联和初值优化。前端的数据关联模块包括1个短 每个粒子来说机器人的运动路径是确定的,故特征 标志之间相互独立且其观测信息只与机器人的位姿 期(局部)数据关联模块和1个长期(回环)数据关 联模块。通常意义下的数据关联问题在SLAM中 有关。FastSLAM的时间复杂度为O(kn),其中 k为粒子个数0。用树形数据结构优化后的时间复 是指递增定位与建图过程中如何确定当前连续的传 杂度可以达到O(k log n)B0。FastSLAM能够比较 感器观测之间或者当前时刻的观测与最近所创建的 好地表示机器人的非线性、非高斯运动模型。 局部地图中特征间的关联关系,这也称为短期(局 EKF存在非线性误差,且需要存储、维护和更 部)数据关联;回环检测中的数据关联研究机器人 新状态量的均值和方差。如果把路标也加入状态的 沿不同的路径回到某一循环的起点时,如何确定当 话,由于V SLAM中路标数量很大,这个存储量是 前创建的局部地图中的特征与以前所创建的循环起 相当大的,且与状态量呈平方增长(因为要存储协 点处地图中的特征间的关联关系,这称为长期(回 方差矩阵)。因此,EKF普遍被认为不适用于大型 环)数据关联。短期的数据关联模块负责关联传感 场景。P℉采样所需的粒子数量,随维度的增加呈指 器中连续的观测值对应的特征:得到1帧图像数据 数增长,所以仅限于低维的问题,对高维问题不适 后,对其进行预处理,筛选出关键帧,对图像进行特 用。除此之外,滤波器方法在一定程度上假设了马 征提取、匹配以及运动求解并得到局部地图,也就 尔可夫性,如果当前帧与很久之前的帧有关(例如 是视觉里程计(visual odometry,VO);长期的数据 回环),那么滤波器就会难以处理这种情况。因为 关联负责将新的观测值关联到旧的路标上,也就是 滤波这些明显的缺点,在同等计算量的情况下,非 回环(loop closure),方法中,只对约束关系进行局部更新,这种局部更 新使得信息矩阵近似于系数矩阵,有效降 低 SLAM 的时间复杂度。 Davison[35]于 2007 年提出的 MonoSLAM,是第 一个基于 EKF 方法实时的单目 VSLAM 系统,虽然 初步解决了实时的问题,能够在线创建稀疏地图, 漂移多少仍然不能确定,目前已经停止对其的开发。 图 5 是基于 EKF 的单目 VSLAM 流程图。 2.1.2 基于粒子滤波器的 FastSLAM M. Montemerlo 等 [36-37]提出了 1 种基于粒子滤 波器 (particle filter, PF) 的 FastSLAM 方法。 FastSLAM 包含了机器人定位和特征标志位置估计两个 过程。粒子滤波器法中机器人可能的运动路径用粒 子表示,1 个粒子对应着 1 种可能,每条路径的好坏 由利用观测信息计算得到的粒子权重来评价。对于 每个粒子来说机器人的运动路径是确定的,故特征 标志之间相互独立且其观测信息只与机器人的位姿 有关。FastSLAM 的时间复杂度为 O (kn) ,其中 k 为粒子个数[30]。用树形数据结构优化后的时间复 杂度可以达到 O (k log n) [30]。 FastSLAM 能够比较 好地表示机器人的非线性 、非高斯运动模型。 EKF 存在非线性误差,且需要存储、维护和更 新状态量的均值和方差。如果把路标也加入状态的 话,由于 V SLAM 中路标数量很大,这个存储量是 相当大的,且与状态量呈平方增长(因为要存储协 方差矩阵)。因此,EKF 普遍被认为不适用于大型 场景。PF 采样所需的粒子数量,随维度的增加呈指 数增长,所以仅限于低维的问题,对高维问题不适 用。除此之外,滤波器方法在一定程度上假设了马 尔可夫性,如果当前帧与很久之前的帧有关(例如 回环),那么滤波器就会难以处理这种情况。因为 滤波这些明显的缺点,在同等计算量的情况下,非 线性优化的方法(现代 SLAM 系统)可以取得更好 的效果[10]。 另外,在 2011 年滤波方面出现了基于 RFS (random finite set) 的方法[38]。RFS 是滤波中新兴的 潮流[38] ,RFS 是以集合为元素的集合,此集合中的 元素及元素个数都是随机变量。文献[38]对环境地 图和传感器观测信息用 RFS 建模,构造联合目标状 态变量的 RFS。依据贝叶斯滤波框架,利用概率假 设密度滤波(probability hypothesis density, PHD) [39] 实现对机器人位姿和环境地图同时估计。该算法避 免了数据关联的问题,相对于 EKF 和 PF 能更有效 地表达 SLAM 问题。 2.2 现代 SLAM 系统:基于非线性优化的方法 现代 SlAM 系统分为两个部分:前端和后端[1]。 前端提取传感器数据构建模型用于状态估计,后 端根据前端提供的数据进行优化。这个架构如图 6 所示。 当前 SLAM 事实标准形成来源于 Lu 和 Milios[40] , 它是 Gutmann 和 Konolige[41]研究的后续。典型的 SLAM 系统如图 6 所示,前端进行特征提取、数据 关联和初值优化。前端的数据关联模块包括 1 个短 期(局部)数据关联模块和 1 个长期 (回环) 数据关 联模块。通常意义下的数据关联问题在 SLAM 中 是指递增定位与建图过程中如何确定当前连续的传 感器观测之间或者当前时刻的观测与最近所创建的 局部地图中特征间的关联关系,这也称为短期(局 部)数据关联;回环检测中的数据关联研究机器人 沿不同的路径回到某一循环的起点时,如何确定当 前创建的局部地图中的特征与以前所创建的循环起 点处地图中的特征间的关联关系,这称为长期(回 环)数据关联。短期的数据关联模块负责关联传感 器中连续的观测值对应的特征:得到 1 帧图像数据 后,对其进行预处理,筛选出关键帧,对图像进行特 征提取、匹配以及运动求解并得到局部地图,也就 是视觉里程计(visual odometry,VO);长期的数据 关联负责将新的观测值关联到旧的路标上,也就是 回环(loop closure)。 ᐬ/ ֈ₎ ьᙋஔԍᖛ 䓼ߔὍಷ EKF 䶰≷ ᢚ 㖀ڟ EKF ᰠ ≷䛻 Ὅಷ 6 㐠➥ᒭ ݜ3 㐠➥ᒭ ➥ᒭ◥ ࡂ݉ ➥ᒭ 䒘ᢎ ➥ ᒭ◥ 㻲䶽 ప N N Y Y 图 5 基于 EKF 的单目 VSLAM 流程图 Fig. 5 Flowchart of EKF-based monocular VSLAM ьᙋஔᢚ ࡂф 〚ऺ 〚ݹ ➥ᒭं ᢚڟ㖀 ⴙ(䌋䍖) 䪫(ఊ⣛) 图 6 典型 SLAM 系统 Fig. 6 Typical SLAM system 第 1 期 周彦,等:视觉同时定位与地图创建综述 ·101·