正在加载图片...
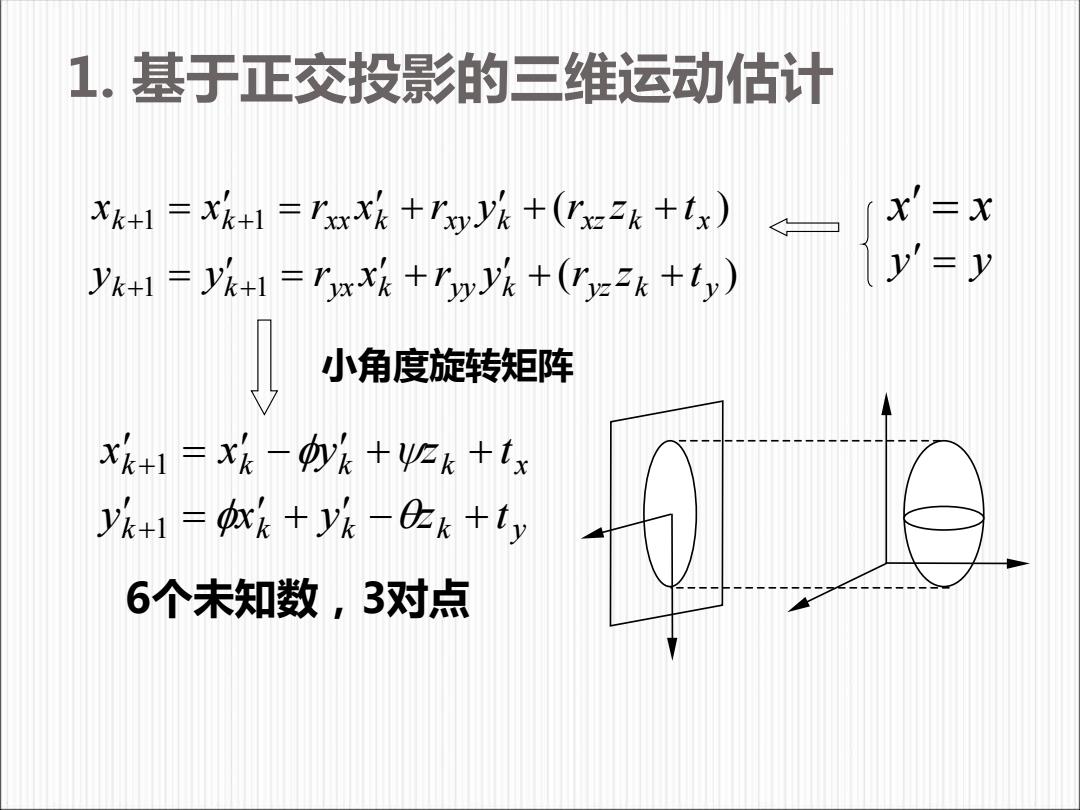
1.基于正交投影的三维运动估计 Xk+1=xk+1=Txxxk+xy+(TxZk+tx) =X yk+1=k+1=rxxk+r(ryzEk +ty) y'=y 小角度旋转矩阵 Xk+1=xk-oy+ck+tx yk+1=xk+y-ek +ty 6个未知数,3对点1. 基于正交投影的三维运动估计 x = x y = y ( ) ( ) 1 1 1 1 k k yx k yy k yz k y k k xx k xy k xz k x y y r x r y r z t x x r x r y r z t = = + + + = = + + + + + + + k k k k y k k k k x y x y z t x x y z t = + − + = − + + + + 1 1 小角度旋转矩阵 6个未知数,3对点