正在加载图片...
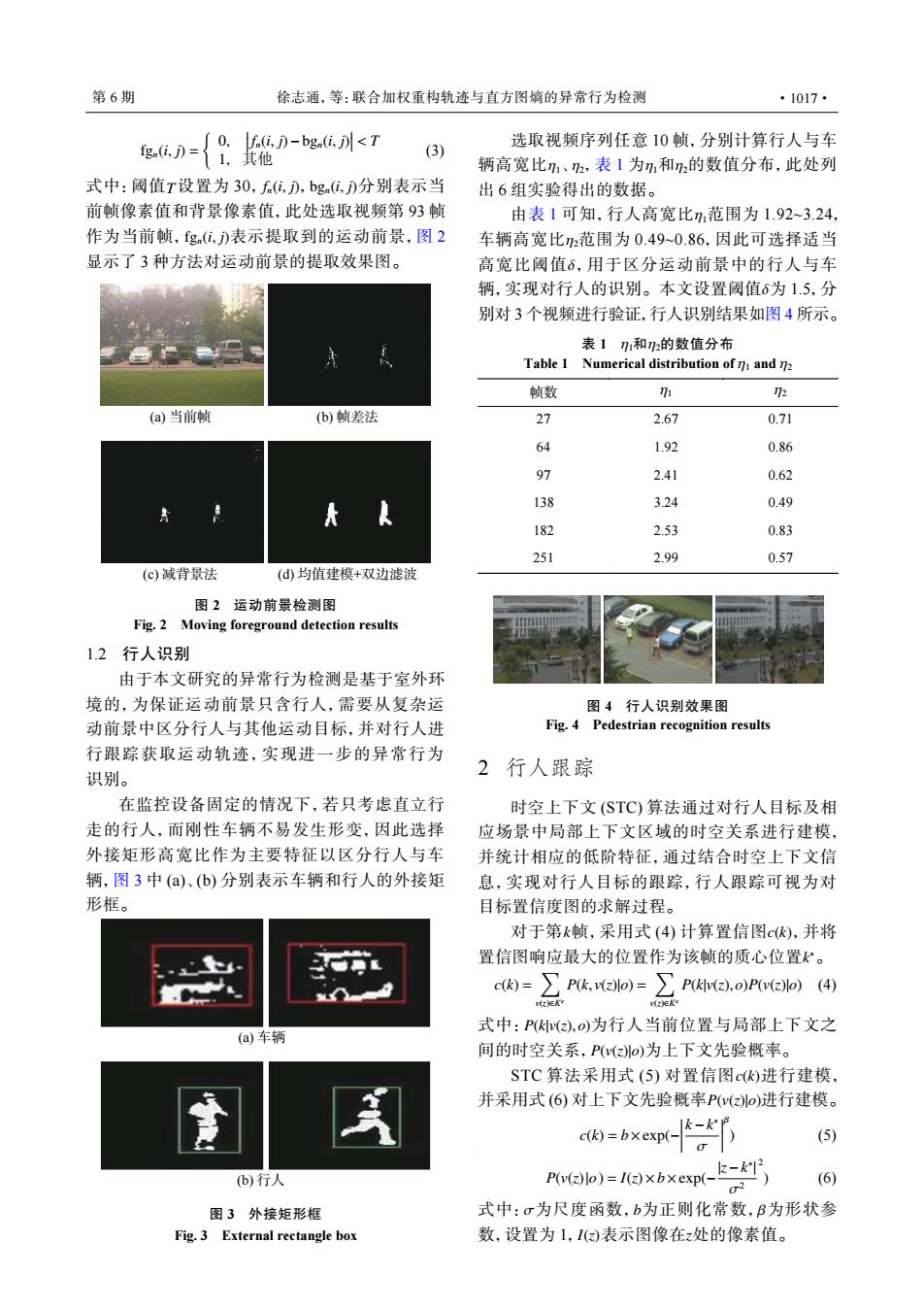
第6期 徐志通,等:联合加权重构轨迹与直方图嫡的异常行为检测 ·1017· 0,f.(i,j)-bg.(i.j)<T g.伍)=1其他 (3) 选取视频序列任意10帧,分别计算行人与车 辆高宽比、2,表1为n,和2的数值分布,此处列 式中:阈值T设置为30,f(位,),bg位,》分别表示当 出6组实验得出的数据。 前帧像素值和背景像素值,此处选取视频第93帧 由表1可知,行人高宽比n范围为1.92~3.24, 作为当前帧,g(位,)表示提取到的运动前景,图2 车辆高宽比2范围为0.49-0.86,因此可选择适当 显示了3种方法对运动前景的提取效果图。 高宽比阈值6,用于区分运动前景中的行人与车 辆,实现对行人的识别。本文设置阈值6为1.5,分 别对3个视频进行验证,行人识别结果如图4所示。 表1刀1和2的数值分布 Table 1 Numerical distribution of n and n2 帧数 72 (a)当前帧 (b)帧差法 27 2.67 0.71 64 1.92 0.86 97 2.41 0.62 138 3.24 0.49 182 2.53 0.83 251 2.99 0.57 (c)减背景法 (d均值建模+双边滤波 图2运动前景检测图 Fig.2 Moving foreground detection results 1.2行人识别 由于本文研究的异常行为检测是基于室外环 境的,为保证运动前景只含行人,需要从复杂运 图4行人识别效果图 动前景中区分行人与其他运动目标,并对行人进 Fig.4 Pedestrian recognition results 行跟踪获取运动轨迹,实现进一步的异常行为 识别。 2行人跟踪 在监控设备固定的情况下,若只考虑直立行 时空上下文(STC)算法通过对行人目标及相 走的行人,而刚性车辆不易发生形变,因此选择 应场景中局部上下文区域的时空关系进行建模, 外接矩形高宽比作为主要特征以区分行人与车 并统计相应的低阶特征,通过结合时空上下文信 辆,图3中(a)、(b)分别表示车辆和行人的外接矩 息,实现对行人目标的跟踪,行人跟踪可视为对 形框。 目标置信度图的求解过程。 对于第k帧,采用式(4)计算置信图c),并将 置信图响应最大的位置作为该帧的质心位置k。 c=∑Pk3lo)=∑P.oP(v(J)(④ 2)E 式中:Pv,o)为行人当前位置与局部上下文之 (a)车辆 间的时空关系,P(v(o)为上下文先验概率。 STC算法采用式(5)对置信图c进行建模, 并采用式(6)对上下文先验概率P(v(o)进行建模。 c(k)=bxexp( (5) b)行人 P(v())-Ixbxexp-k-kT 02 (6) 图3外接矩形框 式中:σ为尺度函数,b为正则化常数,B为形状参 Fig.3 External rectangle box 数,设置为1,1)表示图像在z处的像素值。fgn(i, j) = { 0,
fn(i, j)−bgn(i, j)
< T 1, 其他 (3) T fn(i, j) bgn(i, j) fgn(i, j) 式中:阈值 设置为 30, , 分别表示当 前帧像素值和背景像素值,此处选取视频第 93 帧 作为当前帧, 表示提取到的运动前景,图 2 显示了 3 种方法对运动前景的提取效果图。 (a) 当前帧 (b) 帧差法 (c) 减背景法 (d) 均值建模+双边滤波 图 2 运动前景检测图 Fig. 2 Moving foreground detection results 1.2 行人识别 由于本文研究的异常行为检测是基于室外环 境的,为保证运动前景只含行人,需要从复杂运 动前景中区分行人与其他运动目标,并对行人进 行跟踪获取运动轨迹,实现进一步的异常行为 识别。 在监控设备固定的情况下,若只考虑直立行 走的行人,而刚性车辆不易发生形变,因此选择 外接矩形高宽比作为主要特征以区分行人与车 辆,图 3 中 (a)、(b) 分别表示车辆和行人的外接矩 形框。 η1 η2 η1 η2 选取视频序列任意 10 帧,分别计算行人与车 辆高宽比 、 ,表 1 为 和 的数值分布,此处列 出 6 组实验得出的数据。 η1 η2 δ δ 由表 1 可知,行人高宽比 范围为 1.92~3.24, 车辆高宽比 范围为 0.49~0.86,因此可选择适当 高宽比阈值 ,用于区分运动前景中的行人与车 辆,实现对行人的识别。本文设置阈值 为 1.5,分 别对 3 个视频进行验证,行人识别结果如图 4 所示。 表 η1 η2 1 和 的数值分布 Table 1 Numerical distribution of η1 and η2 帧数 η1 η2 27 2.67 0.71 64 1.92 0.86 97 2.41 0.62 138 3.24 0.49 182 2.53 0.83 251 2.99 0.57 图 4 行人识别效果图 Fig. 4 Pedestrian recognition results 2 行人跟踪 时空上下文 (STC) 算法通过对行人目标及相 应场景中局部上下文区域的时空关系进行建模, 并统计相应的低阶特征,通过结合时空上下文信 息,实现对行人目标的跟踪,行人跟踪可视为对 目标置信度图的求解过程。 k c(k) k ∗ 对于第 帧,采用式 (4) 计算置信图 ,并将 置信图响应最大的位置作为该帧的质心位置 。 c(k) = ∑ v(z)∈Kc P(k, v(z)|o) = ∑ v(z)∈Kc P(k|v(z),o)P(v(z)|o) (4) P(k|v(z),o) P(v(z)|o) 式中: 为行人当前位置与局部上下文之 间的时空关系, 为上下文先验概率。 c(k) P(v(z)|o) STC 算法采用式 (5) 对置信图 进行建模, 并采用式 (6) 对上下文先验概率 进行建模。 c(k) = b×exp(−
k−k ∗ σ
β ) (5) P(v(z)|o) = I(z)×b×exp(− |z−k ∗ | σ2 2 ) (6) σ b β I(z) z 式中: 为尺度函数, 为正则化常数, 为形状参 数,设置为 1, 表示图像在 处的像素值。 (a) 车辆 (b) 行人 图 3 外接矩形框 Fig. 3 External rectangle box 第 6 期 徐志通,等:联合加权重构轨迹与直方图熵的异常行为检测 ·1017·