正在加载图片...
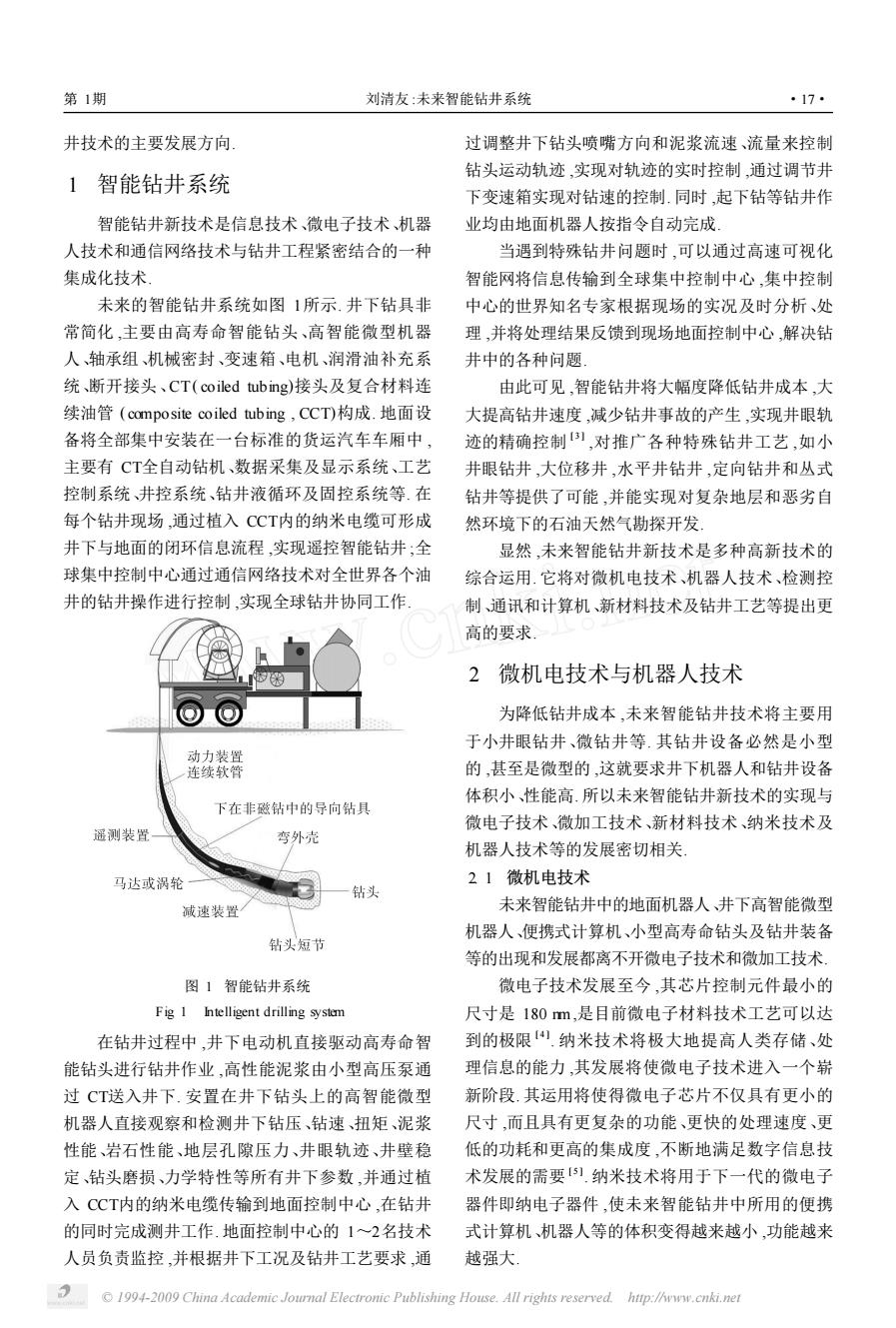
第1期 刘清友:未来智能钻井系统 ·17。 井技术的主要发展方向」 过调整井下钻头喷嘴方向和泥浆流速、流量来控制 1智能钻井系统 钻头运动轨迹,实现对轨迹的实时控制,通过调节井 下变速箱实现对钻速的控制.同时,起下钻等钻井作 智能钻井新技术是信息技术、微电子技术机器 业均由地面机器人按指令自动完成: 人技术和通信网络技术与钻井工程紧密结合的一种 当遇到特殊钻井问题时,可以通过高速可视化 集成化技术 智能网将信息传输到全球集中控制中心,集中控制 未来的智能钻井系统如图1所示.井下钻具非 中心的世界知名专家根据现场的实况及时分析、处 常简化,主要由高寿命智能钻头、高智能微型机器 理,并将处理结果反馈到现场地面控制中心,解决钻 人、轴承组、机械密封、变速箱、电机、润滑油补充系 井中的各种问题 统、断开接头、CT(coiled tubing)接头及复合材料连 由此可见,智能钻井将大幅度降低钻井成本,大 续油管(composite coiled tubing,CCT)构成.地面设 大提高钻井速度,减少钻井事故的产生,实现井眼轨 备将全部集中安装在一台标准的货运汽车车厢中, 迹的精确控制1,对推广各种特殊钻井工艺,如小 主要有CT全自动钻机、数据采集及显示系统、工艺 井眼钻井,大位移井,水平井钻井,定向钻井和丛式 控制系统、井控系统、钻井液循环及固控系统等.在 钻井等提供了可能,并能实现对复杂地层和恶劣自 每个钻井现场,通过植入CCT内的纳米电缆可形成 然环境下的石油天然气勘探开发 井下与地面的闭环信息流程,实现遥控智能钻井;全 显然,未来智能钻井新技术是多种高新技术的 球集中控制中心通过通信网络技术对全世界各个油 综合运用.它将对微机电技术、机器人技术、检测控 井的钻井操作进行控制,实现全球钻井协同工作 制、通讯和计算机、新材料技术及钻井工艺等提出更 高的要求」 2微机电技术与机器人技术 为降低钻井成本,未来智能钻井技术将主要用 于小井眼钻井、微钻井等.其钻井设备必然是小型 动力装置 连续软管 的,甚至是微型的,这就要求井下机器人和钻井设备 体积小、性能高.所以未来智能钻井新技术的实现与 下在非磁钻中的导向钻具 微电子技术、微加工技术、新材料技术、纳米技术及 遥测装置 弯外壳 机器人技术等的发展密切相关 马达或祸轮 21微机电技术 钻头 减速装置 未来智能钻井中的地面机器人、井下高智能微型 机器人、便携式计算机、小型高寿命钻头及钻井装备 钻头短节 等的出现和发展都离不开微电子技术和微加工技术. 图1智能钻井系统 微电子技术发展至今,其芯片控制元件最小的 Fig 1 Intelligent drilling system 尺寸是180m,是目前微电子材料技术工艺可以达 在钻井过程中,井下电动机直接驱动高寿命智 到的极限)纳米技术将极大地提高人类存储、处 能钻头进行钻井作业,高性能泥浆由小型高压泵通 理信息的能力,其发展将使微电子技术进入一个崭 过CT送入井下.安置在井下钻头上的高智能微型 新阶段.其运用将使得微电子芯片不仅具有更小的 机器人直接观察和检测井下钻压、钻速、扭矩、泥浆 尺寸,而且具有更复杂的功能、更快的处理速度、更 性能、岩石性能、地层孔隙压力、井眼轨迹、井壁稳 低的功耗和更高的集成度,不断地满足数字信息技 定、钻头磨损、力学特性等所有井下参数,并通过植 术发展的需要51.纳米技术将用于下一代的微电子 入CCT内的纳米电缆传输到地面控制中心,在钻井 器件即纳电子器件,使未来智能钻井中所用的便携 的同时完成测井工作.地面控制中心的1~2名技术 式计算机、机器人等的体积变得越来越小,功能越来 人员负责监控,并根据井下工况及钻井工艺要求,通 越强大」 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net井技术的主要发展方向. 1 智能钻井系统 智能钻井新技术是信息技术、微电子技术、机器 人技术和通信网络技术与钻井工程紧密结合的一种 集成化技术. 未来的智能钻井系统如图 1所示. 井下钻具非 常简化 ,主要由高寿命智能钻头、高智能微型机器 人、轴承组、机械密封、变速箱、电机、润滑油补充系 统、断开接头、CT( coiled tubing)接头及复合材料连 续油管 ( composite coiled tubing , CCT)构成. 地面设 备将全部集中安装在一台标准的货运汽车车厢中 , 主要有 CT全自动钻机、数据采集及显示系统、工艺 控制系统、井控系统、钻井液循环及固控系统等. 在 每个钻井现场 ,通过植入 CCT内的纳米电缆可形成 井下与地面的闭环信息流程 ,实现遥控智能钻井 ;全 球集中控制中心通过通信网络技术对全世界各个油 井的钻井操作进行控制 ,实现全球钻井协同工作. 图 1 智能钻井系统 Fig. 1 Intelligent drilling system 在钻井过程中 ,井下电动机直接驱动高寿命智 能钻头进行钻井作业 ,高性能泥浆由小型高压泵通 过 CT送入井下. 安置在井下钻头上的高智能微型 机器人直接观察和检测井下钻压、钻速、扭矩、泥浆 性能、岩石性能、地层孔隙压力、井眼轨迹、井壁稳 定、钻头磨损、力学特性等所有井下参数 ,并通过植 入 CCT内的纳米电缆传输到地面控制中心 ,在钻井 的同时完成测井工作. 地面控制中心的 1~2名技术 人员负责监控 ,并根据井下工况及钻井工艺要求 ,通 过调整井下钻头喷嘴方向和泥浆流速、流量来控制 钻头运动轨迹 ,实现对轨迹的实时控制 ,通过调节井 下变速箱实现对钻速的控制. 同时 ,起下钻等钻井作 业均由地面机器人按指令自动完成. 当遇到特殊钻井问题时 ,可以通过高速可视化 智能网将信息传输到全球集中控制中心 ,集中控制 中心的世界知名专家根据现场的实况及时分析、处 理 ,并将处理结果反馈到现场地面控制中心 ,解决钻 井中的各种问题. 由此可见 ,智能钻井将大幅度降低钻井成本 ,大 大提高钻井速度 ,减少钻井事故的产生 ,实现井眼轨 迹的精确控制 [ 3 ] ,对推广各种特殊钻井工艺 ,如小 井眼钻井 ,大位移井 ,水平井钻井 ,定向钻井和丛式 钻井等提供了可能 ,并能实现对复杂地层和恶劣自 然环境下的石油天然气勘探开发. 显然 ,未来智能钻井新技术是多种高新技术的 综合运用. 它将对微机电技术、机器人技术、检测控 制、通讯和计算机、新材料技术及钻井工艺等提出更 高的要求. 2 微机电技术与机器人技术 为降低钻井成本 ,未来智能钻井技术将主要用 于小井眼钻井、微钻井等. 其钻井设备必然是小型 的 ,甚至是微型的 ,这就要求井下机器人和钻井设备 体积小、性能高. 所以未来智能钻井新技术的实现与 微电子技术、微加工技术、新材料技术、纳米技术及 机器人技术等的发展密切相关. 2. 1 微机电技术 未来智能钻井中的地面机器人、井下高智能微型 机器人、便携式计算机、小型高寿命钻头及钻井装备 等的出现和发展都离不开微电子技术和微加工技术. 微电子技术发展至今 ,其芯片控制元件最小的 尺寸是 180 nm,是目前微电子材料技术工艺可以达 到的极限 [ 4 ] . 纳米技术将极大地提高人类存储、处 理信息的能力 ,其发展将使微电子技术进入一个崭 新阶段. 其运用将使得微电子芯片不仅具有更小的 尺寸 ,而且具有更复杂的功能、更快的处理速度、更 低的功耗和更高的集成度 ,不断地满足数字信息技 术发展的需要 [ 5 ] . 纳米技术将用于下一代的微电子 器件即纳电子器件 ,使未来智能钻井中所用的便携 式计算机、机器人等的体积变得越来越小 ,功能越来 越强大. 第 1期 刘清友 :未来智能钻井系统 ·17· © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net