正在加载图片...
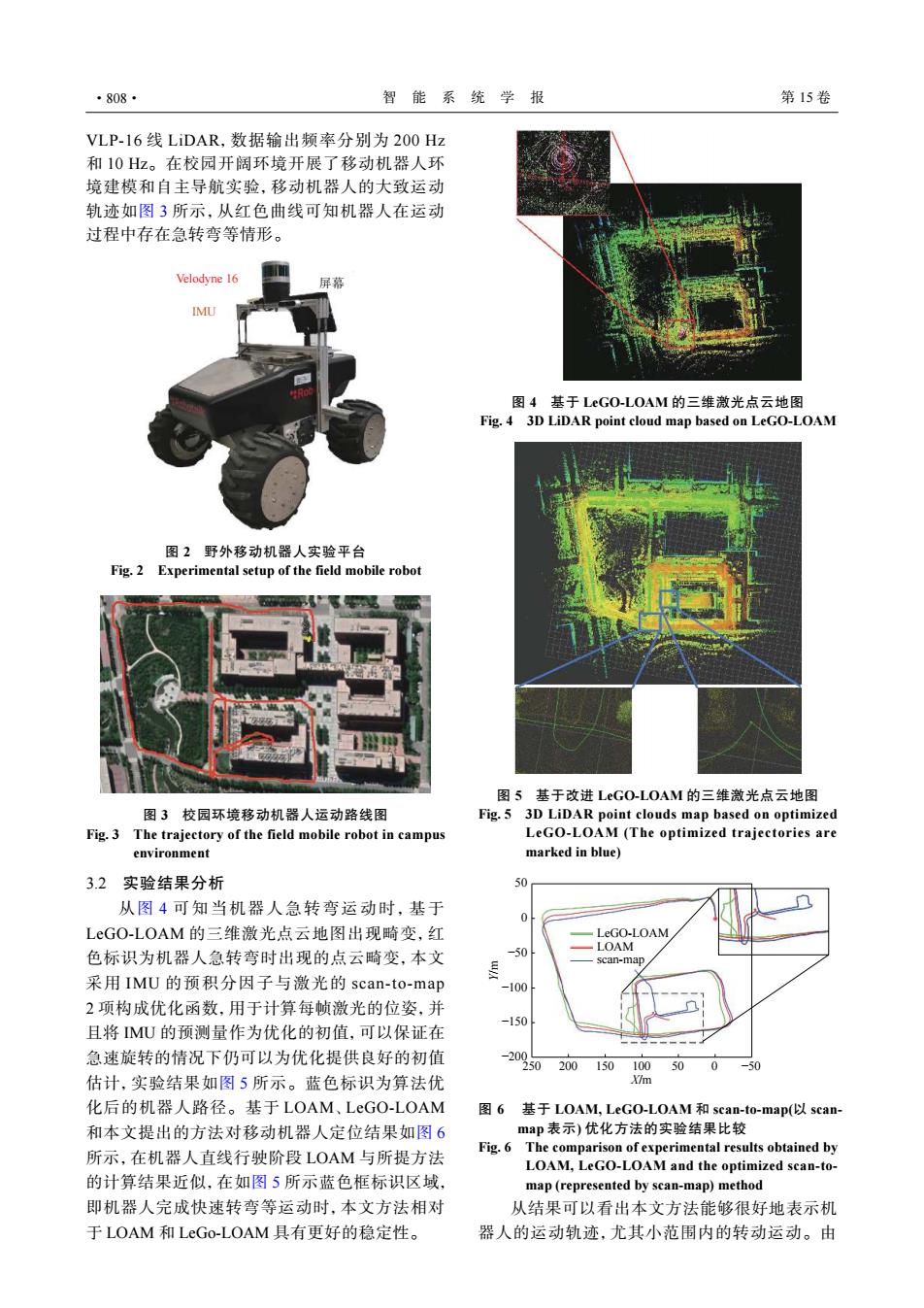
·808· 智能系统学报 第15卷 VLP-16线LiDAR,数据输出频率分别为200Hz 和10Hz。在校园开阔环境开展了移动机器人环 境建模和自主导航实验,移动机器人的大致运动 轨迹如图3所示,从红色曲线可知机器人在运动 过程中存在急转弯等情形。 Velodyne 16 屏幕 IMU 图4基于LeGO-LOAM的三维激光点云地图 Fig.4 3D LiDAR point cloud map based on LeGO-LOAM 图2野外移动机器人实验平台 Fig.2 Experimental setup of the field mobile robot 图5基于改进LeGO-LOAM的三维激光点云地图 图3校园环境移动机器人运动路线图 Fig.5 3D LiDAR point clouds map based on optimized Fig.3 The trajectory of the field mobile robot in campus LeGO-LOAM(The optimized trajectories are environment marked in blue) 3.2实验结果分析 分 从图4可知当机器人急转弯运动时,基于 0 LeGO-LOAM的三维激光点云地图出现畸变,红 LeGO-LOAM 色标识为机器人急转弯时出现的点云畸变,本文 -50 LOAM scan-map 采用IMU的预积分因子与激光的scan-to-map -100 2项构成优化函数,用于计算每帧激光的位姿,并 -150 且将MU的预测量作为优化的初值,可以保证在 急速旋转的情况下仍可以为优化提供良好的初值 20050 200 150100 50 0-50 估计,实验结果如图5所示。蓝色标识为算法优 X/m 化后的机器人路径。基于LOAM、LeGO-LOAM 图6 基于LOAM,LeGO-LOAM和scan-to-map(以scan- 和本文提出的方法对移动机器人定位结果如图6 map表示)优化方法的实验结果比较 所示,在机器人直线行驶阶段LOAM与所提方法 Fig.6 The comparison of experimental results obtained by LOAM,LeGO-LOAM and the optimized scan-to- 的计算结果近似,在如图5所示蓝色框标识区域, map(represented by scan-map)method 即机器人完成快速转弯等运动时,本文方法相对 从结果可以看出本文方法能够很好地表示机 于LOAM和LeGo-LOAM具有更好的稳定性。 器人的运动轨迹,尤其小范围内的转动运动。由VLP-16 线 LiDAR,数据输出频率分别为 200 Hz 和 10 Hz。在校园开阔环境开展了移动机器人环 境建模和自主导航实验,移动机器人的大致运动 轨迹如图 3 所示,从红色曲线可知机器人在运动 过程中存在急转弯等情形。 Velodyne 16 IMU 屏幕 图 2 野外移动机器人实验平台 Fig. 2 Experimental setup of the field mobile robot 图 3 校园环境移动机器人运动路线图 Fig. 3 The trajectory of the field mobile robot in campus environment 3.2 实验结果分析 从图 4 可知当机器人急转弯运动时,基于 LeGO-LOAM 的三维激光点云地图出现畸变,红 色标识为机器人急转弯时出现的点云畸变,本文 采用 IMU 的预积分因子与激光的 scan-to-map 2 项构成优化函数,用于计算每帧激光的位姿,并 且将 IMU 的预测量作为优化的初值,可以保证在 急速旋转的情况下仍可以为优化提供良好的初值 估计,实验结果如图 5 所示。蓝色标识为算法优 化后的机器人路径。基于 LOAM、LeGO-LOAM 和本文提出的方法对移动机器人定位结果如图 6 所示,在机器人直线行驶阶段 LOAM 与所提方法 的计算结果近似,在如图 5 所示蓝色框标识区域, 即机器人完成快速转弯等运动时,本文方法相对 于 LOAM 和 LeGo-LOAM 具有更好的稳定性。 图 4 基于 LeGO-LOAM 的三维激光点云地图 Fig. 4 3D LiDAR point cloud map based on LeGO-LOAM 图 5 基于改进 LeGO-LOAM 的三维激光点云地图 Fig. 5 3D LiDAR point clouds map based on optimized LeGO-LOAM (The optimized trajectories are marked in blue) 50 0 −50 −100 −150 −200 Y/m X/m 250 200 150 100 50 0 −50 LeGO-LOAM LOAM scan-map 图 6 基于 LOAM, LeGO-LOAM 和 scan-to-map(以 scanmap 表示) 优化方法的实验结果比较 Fig. 6 The comparison of experimental results obtained by LOAM, LeGO-LOAM and the optimized scan-tomap (represented by scan-map) method 从结果可以看出本文方法能够很好地表示机 器人的运动轨迹,尤其小范围内的转动运动。由 ·808· 智 能 系 统 学 报 第 15 卷