正在加载图片...
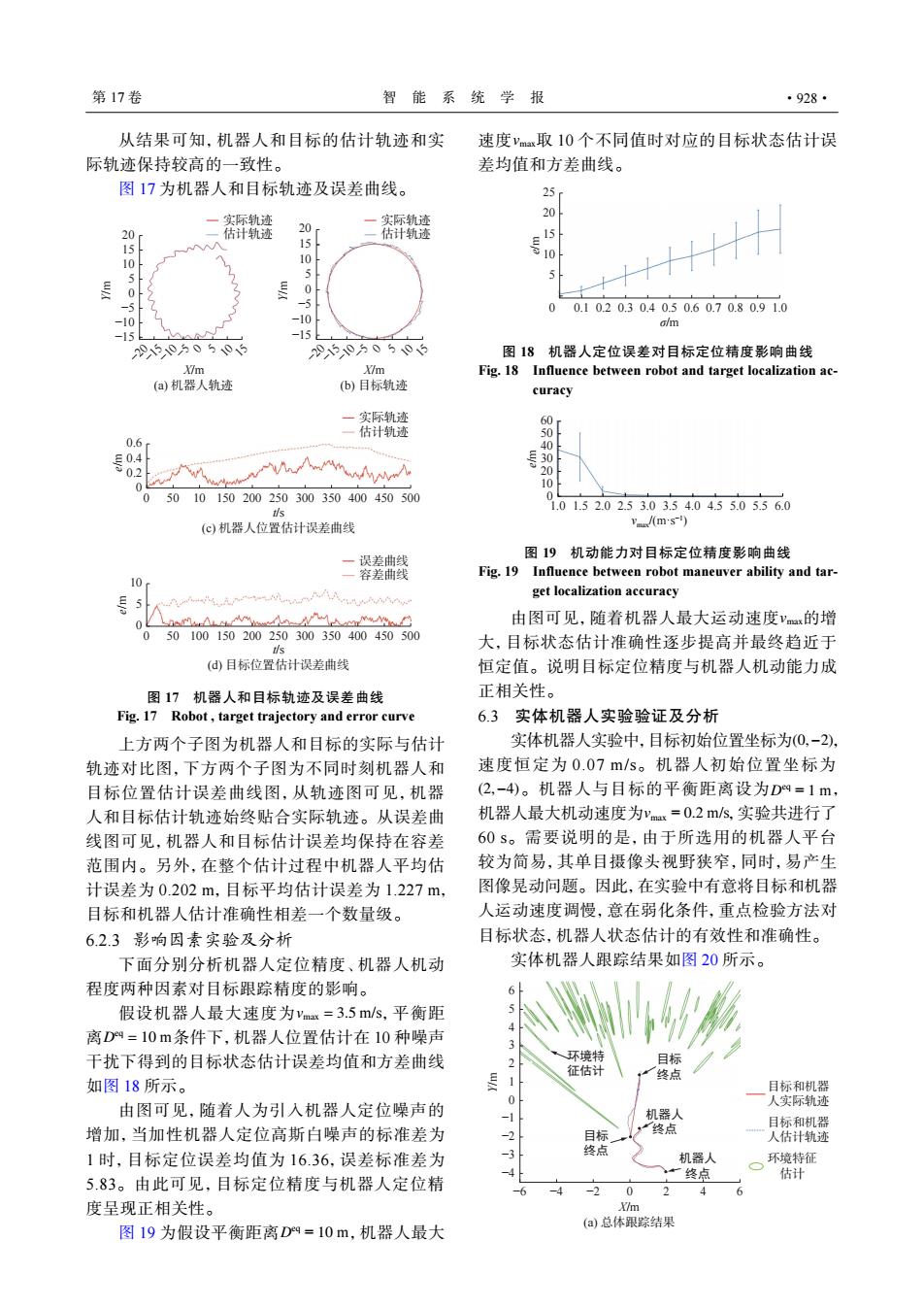
第17卷 智能系统学报 ·928· 从结果可知,机器人和目标的估计轨迹和实 速度v取10个不同值时对应的目标状态估计误 际轨迹保持较高的一致性。 差均值和方差曲线。 图17为机器人和目标轨迹及误差曲线。 25 一实际轨迹 一实际轨迹 20 20 估计轨迹 20 估计轨迹 15 15 10 0 5 5 0 -5 5 00.1020.30.40.50.60.70.80.91.0 -10 -1 o/m -15 -15 50为0505 89为0505 图18机器人定位误差对目标定位精度影响曲线 X/m X/m Fig.18 Influence between robot and target localization ac- (a)机器人轨迹 (b)目标轨迹 curacy 一实际轨迹 60 一估计轨迹 50 0.6 日0.4 0 0.2 0 0 05010150200250300350400450500 s 1.01.52.02.53.03.54.04.55.05.56.0 (©)机器人位置估计误差曲线 Va/(m's-) 一误差曲线 图19机动能力对目标定位精度影响曲线 容差曲线 Fig.19 Influence between robot maneuver ability and tar- 10 get localization accuracy 0enA4e心Aa的 由图可见,随着机器人最大运动速度vmx的增 050100150200250300350400450500 大,目标状态估计准确性逐步提高并最终趋近于 Us (d)目标位置估计误差曲线 恒定值。说明目标定位精度与机器人机动能力成 图17机器人和目标轨迹及误差曲线 正相关性。 Fig.17 Robot,target trajectory and error curve 63实体机器人实验验证及分析 上方两个子图为机器人和目标的实际与估计 实体机器人实验中,目标初始位置坐标为(0,-2), 轨迹对比图,下方两个子图为不同时刻机器人和 速度恒定为0.07m/s。机器人初始位置坐标为 目标位置估计误差曲线图,从轨迹图可见,机器 (2,-4)。机器人与目标的平衡距离设为D-1m, 人和目标估计轨迹始终贴合实际轨迹。从误差曲 机器人最大机动速度为vmx=02m/s,实验共进行了 线图可见,机器人和目标估计误差均保持在容差 60s。需要说明的是,由于所选用的机器人平台 范围内。另外,在整个估计过程中机器人平均估 较为简易,其单目摄像头视野狭窄,同时,易产生 计误差为0202m,目标平均估计误差为1.227m, 图像晃动问题。因此,在实验中有意将目标和机器 目标和机器人估计准确性相差一个数量级。 人运动速度调慢,意在弱化条件,重点检验方法对 623影响因素实验及分析 目标状态,机器人状态估计的有效性和准确性。 下面分别分析机器人定位精度、机器人机动 实体机器人跟踪结果如图20所示。 程度两种因素对目标跟踪精度的影响。 假设机器人最大速度为vmx=3.5m/s,平衡距 离D=10m条件下,机器人位置估计在10种噪声 干扰下得到的目标状态估计误差均值和方差曲线 2 环境特 目标 征估计 终点 如图18所示。 目标和机器 由图可见,随着人为引入机器人定位噪声的 人实际轨迹 机器人 目标和机器 增加,当加性机器人定位高斯白噪声的标准差为 -2 目标 终点 人估计轨迹 1时,目标定位误差均值为16.36,误差标准差为 终点 机器人 环境特征 ”终点 估计 5.83。由此可见,目标定位精度与机器人定位精 -2 0 2 4 6 度呈现正相关性。 m 图19为假设平衡距离D=10m,机器人最大 (a)总体跟踪结果从结果可知,机器人和目标的估计轨迹和实 际轨迹保持较高的一致性。 图 17 为机器人和目标轨迹及误差曲线。 (a) 机器人轨迹 实际轨迹 估计轨迹 (b) 目标轨迹 15 20 20 10 5 0 −5 −10 −15 −20 −15 −10 −5 0 Y/m 15 10 5 0 −5 −10 −15 Y/m X/m 5 10 15 −20 −15 −10 −5 0 X/m 5 10 15 0 50 10 150 200 250 (c) 机器人位置估计误差曲线 (d) 目标位置估计误差曲线 t/s 300 350 400 450 500 0 0 5 10 50 100 150 200 250 t/s e/m 0 0.2 0.6 0.4 e/m 300 350 400 450 500 实际轨迹 估计轨迹 实际轨迹 估计轨迹 误差曲线 容差曲线 图 17 机器人和目标轨迹及误差曲线 Fig. 17 Robot , target trajectory and error curve 上方两个子图为机器人和目标的实际与估计 轨迹对比图,下方两个子图为不同时刻机器人和 目标位置估计误差曲线图,从轨迹图可见,机器 人和目标估计轨迹始终贴合实际轨迹。从误差曲 线图可见,机器人和目标估计误差均保持在容差 范围内。另外,在整个估计过程中机器人平均估 计误差为 0.202 m,目标平均估计误差为 1.227 m, 目标和机器人估计准确性相差一个数量级。 6.2.3 影响因素实验及分析 下面分别分析机器人定位精度、机器人机动 程度两种因素对目标跟踪精度的影响。 vmax = 3.5 m/s D eq = 10 m 假设机器人最大速度为 ,平衡距 离 条件下,机器人位置估计在 10 种噪声 干扰下得到的目标状态估计误差均值和方差曲线 如图 18 所示。 由图可见,随着人为引入机器人定位噪声的 增加,当加性机器人定位高斯白噪声的标准差为 1 时,目标定位误差均值为 16.36,误差标准差为 5.83。由此可见,目标定位精度与机器人定位精 度呈现正相关性。 D eq 图 19 为假设平衡距离 = 10 m ,机器人最大 速度 vmax取 10 个不同值时对应的目标状态估计误 差均值和方差曲线。 25 20 15 10 5 0 0.1 0.2 0.3 0.4 0.5 0.6 σ/m e/m 0.7 0.8 0.9 1.0 图 18 机器人定位误差对目标定位精度影响曲线 Fig. 18 Influence between robot and target localization accuracy 60 e/m vmax/(m·s−1) 50 40 30 20 10 0 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 图 19 机动能力对目标定位精度影响曲线 Fig. 19 Influence between robot maneuver ability and target localization accuracy 由图可见,随着机器人最大运动速度 vmax的增 大,目标状态估计准确性逐步提高并最终趋近于 恒定值。说明目标定位精度与机器人机动能力成 正相关性。 6.3 实体机器人实验验证及分析 (0,−2) (2,−4) D eq = 1 m vmax = 0.2 m/s 实体机器人实验中,目标初始位置坐标为 , 速度恒定为 0.07 m/s。机器人初始位置坐标为 。机器人与目标的平衡距离设为 , 机器人最大机动速度为 ,实验共进行了 60 s。需要说明的是,由于所选用的机器人平台 较为简易,其单目摄像头视野狭窄,同时,易产生 图像晃动问题。因此,在实验中有意将目标和机器 人运动速度调慢,意在弱化条件,重点检验方法对 目标状态,机器人状态估计的有效性和准确性。 实体机器人跟踪结果如图 20 所示。 (a) 总体跟踪结果 机器人 终点 机器人 终点 目标 终点 目标 终点 环境特 征估计 目标和机器 人实际轨迹 目标和机器 人估计轨迹 环境特征 估计 6 5 4 3 Y/m X/m 2 1 0 −1 −2 −3 −4 −6 −4 −2 0 2 4 6 (b) 机器人跟踪结果 (c) 目标跟踪结果 −2.0 −2.5 1.5 1.0 0.5 −0.5 −1.0 −1.5 −2.5 −3.0 −3.5 −0.5 −2.0 −1.0 0.5 1.0 2.0 Y/m Y/m X/m X/m 1.0 1.5 2.0 2.5 第 17 卷 智 能 系 统 学 报 ·928·