正在加载图片...
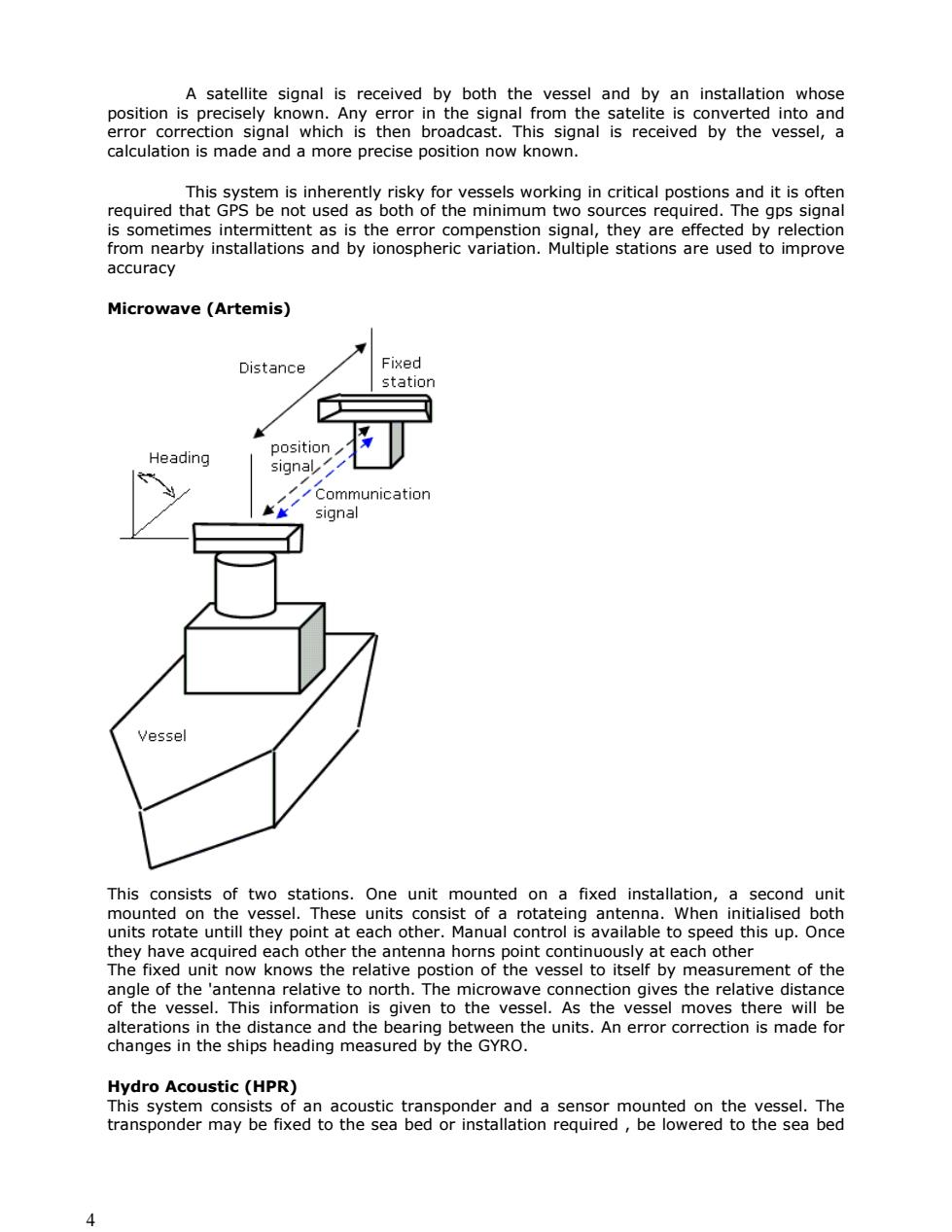
A satellite signal is received by both the vessel and by an installation whose This signal is received by the vessel,a This is sometimes intermittent as is the error compenstion signal,they are effected by relection from nearby installations and by ionospheric variation.Multiple stations are used to improve accuracy Microwave(Artemis】 Distance Heading unicatior This consists of two stations.One unit uni they have acquired each other the antenna horns point continuously at each other The fixed unit now knows the relative postion of the vessel to itself by measurement of the angle of the antenna relative to norti Icrowave conne tion gives the relative distance dista and the bearing betwee changes in the ships heading measured by the GYRO. Hydro Acoustic(HPR) This system consi transpondA satellite signal is received by both the vessel and by an installation whose position is precisely known. Any error in the signal from the satelite is converted into and error correction signal which is then broadcast. This signal is received by the vessel, a calculation is made and a more precise position now known. This system is inherently risky for vessels working in critical postions and it is often required that GPS be not used as both of the minimum two sources required. The gps signal is sometimes intermittent as is the error compenstion signal, they are effected by relection from nearby installations and by ionospheric variation. Multiple stations are used to improve accuracy Microwave (Artemis) This consists of two stations. One unit mounted on a fixed installation, a second unit mounted on the vessel. These units consist of a rotateing antenna. When initialised both units rotate untill they point at each other. Manual control is available to speed this up. Once they have acquired each other the antenna horns point continuously at each other The fixed unit now knows the relative postion of the vessel to itself by measurement of the angle of the 'antenna relative to north. The microwave connection gives the relative distance of the vessel. This information is given to the vessel. As the vessel moves there will be alterations in the distance and the bearing between the units. An error correction is made for changes in the ships heading measured by the GYRO. Hydro Acoustic (HPR) This system consists of an acoustic transponder and a sensor mounted on the vessel. The transponder may be fixed to the sea bed or installation required , be lowered to the sea bed 4