正在加载图片...
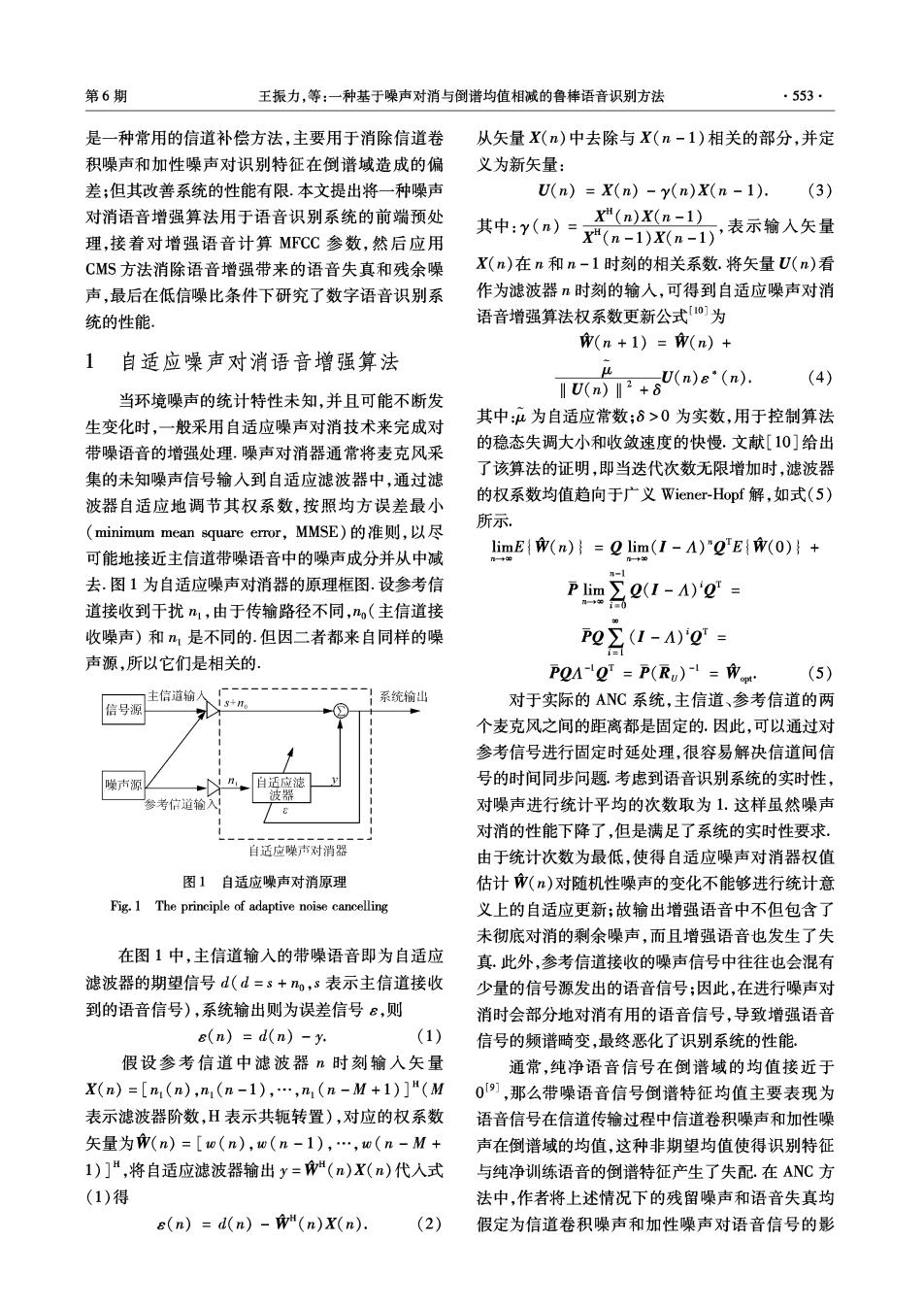
第6期 王振力,等:一种基于噪声对消与倒谱均值相减的鲁棒语音识别方法 ·553· 是一种常用的信道补偿方法,主要用于消除信道卷 从矢量X(n)中去除与X(n-1)相关的部分,并定 积噪声和加性噪声对识别特征在倒谱域造成的偏 义为新矢量: 差;但其改善系统的性能有限.本文提出将一种噪声 U(n)=X(n)-y(n)X(n-1). (3) 对消语音增强算法用于语音识别系统的前端预处 理,接着对增强语音计算MFCC参数,然后应用 共中:7(a)=0)表不格人灰量 CMS方法消除语音增强带来的语音失真和残余噪 X(n)在n和n-1时刻的相关系数.将矢量U(n)看 声,最后在低信噪比条件下研究了数字语音识别系 作为滤波器n时刻的输入,可得到自适应噪声对消 统的性能, 语音增强算法权系数更新公式0]为 (n+1)=(n)+ 1自适应噪声对消语音增强算法 L,U(n)e·(n). (4) 当环境噪声的统计特性未知,并且可能不断发 1U(n)‖2+8 生变化时,一般采用自适应噪声对消技术来完成对 其中:μ为自适应常数;6>0为实数,用于控制算法 带噪语音的增强处理.噪声对消器通常将麦克风采 的稳态失调大小和收敛速度的快慢.文献[10]给出 了该算法的证明,即当迭代次数无限增加时,滤波器 集的未知噪声信号输入到自适应滤波器中,通过滤 的权系数均值趋向于广义Wiener-Hopf解,如式(5) 波器自适应地调节其权系数,按照均方误差最小 (minimum mean square error,MMSE)的准则,以尽 所示. 可能地接近主信道带噪语音中的噪声成分并从中减 limE1(n)}=2lim(1-A)“Q'E{(0)}+ 去.图1为自适应噪声对消器的原理框图.设参考信 道接收到干扰n1,由于传输路径不同,no(主信道接 (1-A)'- 收噪声)和1是不同的.但因二者都来自同样的噪 P0∑(1-4)Q= 声源,所以它们是相关的, POA-OT =P(Ru)=Wo (5) 主信道输 系统输出 对于实际的ANC系统,主信道、参考信道的两 倍号源 个麦克风之间的距离都是固定的.因此,可以通过对 参考信号进行固定时延处理,很容易解决信道间信 噪市源 自适应滤 号的时间同步问题,考虑到语音识别系统的实时性, 波器 参考信道输入! 对噪声进行统计平均的次数取为1.这样虽然噪声 对消的性能下降了,但是满足了系统的实时性要求. 自活应噪声对消器 由于统计次数为最低,使得自适应噪声对消器权值 图1自适应噪声对消原理 估计W()对随机性噪声的变化不能够进行统计意 Fig.1 The principle of adaptive noise cancelling 义上的自适应更新;故输出增强语音中不但包含了 未彻底对消的剩余噪声,而且增强语音也发生了失 在图1中,主信道输入的带噪语音即为自适应 真.此外,参考信道接收的噪声信号中往往也会混有 滤波器的期望信号d(d=s+no,s表示主信道接收 少量的信号源发出的语音信号;因此,在进行噪声对 到的语音信号),系统输出则为误差信号B,则 消时会部分地对消有用的语音信号,导致增强语音 e(n)=d(n)-y. (1) 信号的频谱畸变,最终恶化了识别系统的性能 假设参考信道中滤波器n时刻输人矢量 通常,纯净语音信号在倒谱域的均值接近于 X(n)=[n(n),n1(n-1),…,n1(n-M+1)](M 09],那么带噪语音信号倒谱特征均值主要表现为 表示滤波器阶数,H表示共轭转置),对应的权系数 语音信号在信道传输过程中信道卷积噪声和加性噪 矢量为(n)=[o(n),w(n-1),…,w(n-M+ 声在倒谱域的均值,这种非期望均值使得识别特征 1)]“,将自适应滤波器输出y=“(n)X(n)代入式 与纯净训练语音的倒谱特征产生了失配.在ANC方 (1)得 法中,作者将上述情况下的残留噪声和语音失真均 e(n)=d(n)-"(n)X(n). (2) 假定为信道卷积噪声和加性噪声对语音信号的影